Moving robot joint space
Firstly we make right click on the robot tree on the left side on layout section then we have several options and from these options we have jump home which return robot to default position, but you need to focus also on using mechanism joint log and mechanism linear jog beside the free hand option.
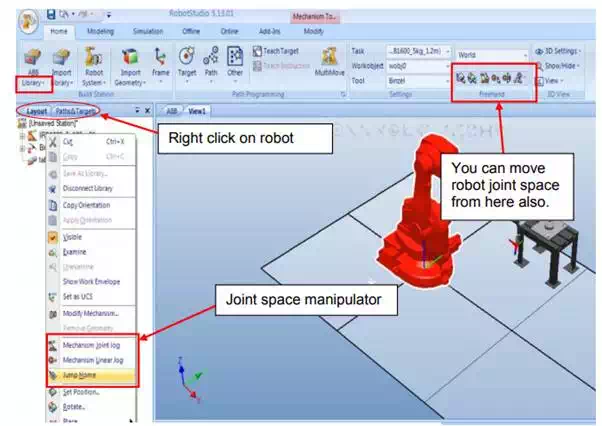
Picture 8 (robot studio screenshot)
Right click on IRB robot so we get the option we need
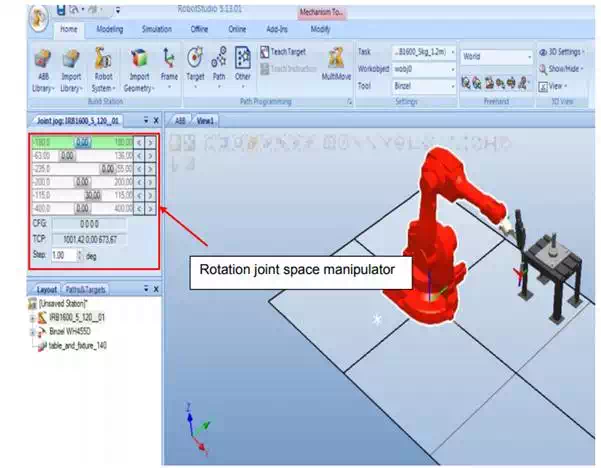
When you click on mechanism joint jog then it will open new window which look like picture 9. We have 6 joints with six coordinate to manipulate so we can choose the degree by moving the slide button left and right on the tree section. First joint move robot left and right, second joint move robot up and down, third joint up and down as well, the last three joint move end effector up and down beside left and right.
When you choose mechanism linear jog then it will appear new window like in picture10 the same way like previous step by moving the slide button left and right we change the coordinate of each joint until we get the desired position. First joint move forward and backward, second joint move right and left with linear motion, third joint move up and down with linear motion, the last three joint move the same like first three but by steps.
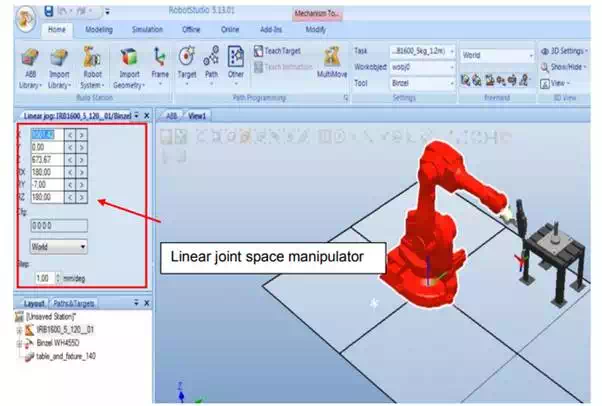
Picture 10 (robot studio screenshot)
This picture shows how to change the linear coordinate of each joint