ULTRASONIC TESTING IN DETAIL
Introduction
Nondestructive material testing with ultrasonics is more than 40 years old. From the very first
examinations, using ultrasonic oscillations for detection of flaws in different
materials, it has become a classical test method based on measurements with due
regard to all the important influencing factors. Today it is expected that
ultrasonic testing, supported by great advances in instrument technology,
give reproducible test results within narrow tolerances. This
assumes exact knowledge of the influencing factors and the ability to apply
these in testing technology. Not all influences have to be seriously regarded
by the operator. In many cases some of the influences can be neglected without
exceeding the permitted measurement tolerances. Due to this, the test sequence
is simplified and the testing time reduced. Despite this, the future belongs to
the qualified operator who carries out his task responsibly and who
continuously endeavours to keep his knowledge at the latest state of the art.
Why use ultrasonics for nondestructive material
testing?
● At the beginning of the
fifties the technician only knew radiography (x-ray or radioactive isotopes) as
a method for detection of internal flaws in addition to the methods for nondestructive testing of material surfaces, e.g. the
dye penetrant and magnetic particle method. After the Second World War the
ultrasonic method, as described by Sokolovin1935
and applied by Firestonein 1940, was
further developed so that very soon instruments were available for ultrasonic
testing of materials. The ultrasonic principle is based on the fact that solid
materials are good conductors of sound waves. Whereby the waves are not only
reflected at the interfaces but also by internal flaws (material separations,
inclusions etc.). The interaction effect of sound waves with the material is
stronger the smaller the wave length, this means the higher the frequency of
the wave.
|
● |
● c = Sound velocity [km/s] ● f = Frequency [MHz] ● l = Wave lenght [mm] |
● This means that ultrasonic
waves must be used in a frequency range between about 0.5 MHz and 25 MHz and
that the resulting wave length is in mm. With lower frequencies, the
interaction effect of the waves with internal flaws would be so small that
detection becomes questionable. Both test methods, radiography and ultrasonic
testing, are the most frequently used methods of testing different test pieces
for internal flaws, partly covering the application range and partly extending
it. This means that today many volume tests are possible with the more
economical and non-risk ultrasonic test method, on the other hand special test
problems are solved, the same as before, using radiography. In cases where the
highest safety requirements are demanded (e.g. nuclear power plants, aerospace
industry) both methods are used.
Ultrasonic
testing tasks
● Is there a primary
classification of tasks assigned to the ultrasonic operator? If we limit
ourselves to testing objects for possible material flaws then the
classification is as follows:
1. Detection of reflectors
2. Location of reflectors
3. Evaluation of reflectors
4. Diagnosis of reflectors
(reflector type, orientation, etc.)
● Instead of using the
word "reflector", the ultrasonic operator very often uses
the term "discontinuity". This is defined as being an
"irregularity in the test object which is suspected as being a flaw".
In reality, only after location, evaluation and diagnosis has been made, can it
be determined whether or not there is a flaw which effects the purpose of the
test object. The term "discontinuity" is therefore always used as
long as it is not certain whether it concerns a flaw which means a
non-permissible irregularity.
Detection of
discontinuities
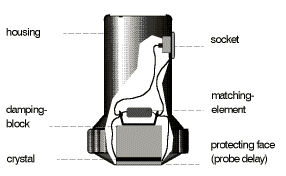
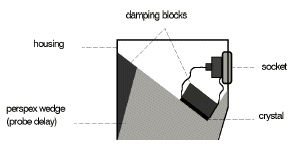
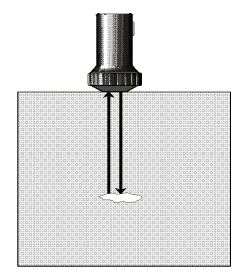
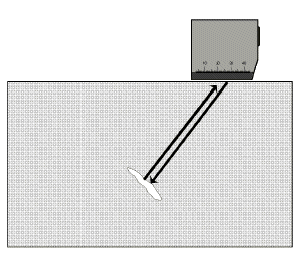
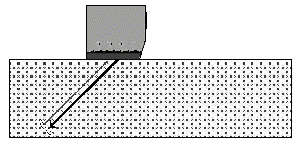
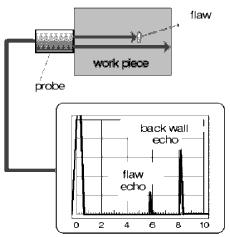
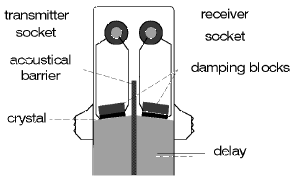
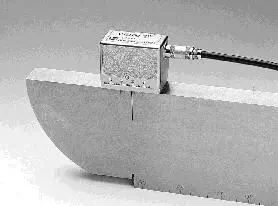
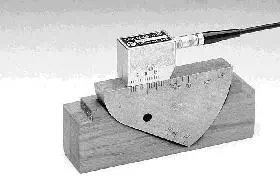
The essential
"tool" for the ultrasonic operator is the probe, Figs. 1a + 1b. The
piezoelectric element, excited by an extremely short electrical discharge,
transmits an ultrasonic pulse. The same element on the other hand generates an
electrical signal when it receives an ultrasonic signal thus causing it to
oscillate. The probe is coupled to the surface of the test object with a liquid
or coupling paste so that the sound waves from the probe are able to be
transmitted into the test object.
|
|
Fig. 1b Angle-beam probe (section) |
The operator
then scans the test object, i.e. he moves the probe evenly to and fro across
the surface. In doing this, he observes an instrument display for any signals
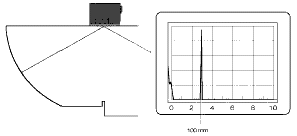
caused by reflections from internal discontinuities, Fig. 2.
|
|
Fig. 2b Plane flaw - angle-beam probe |
|
|

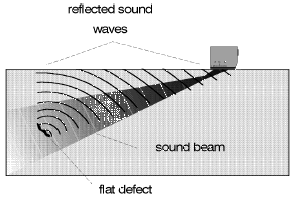
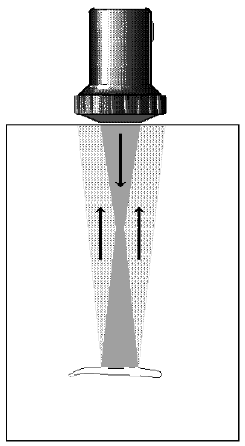
Every probe has
a certain directivity, i.e. the ultrasonic waves only cover a certain section
of the test object. The area effective for the ultrasonic test is called the
"sound beam" which is characteristic for the applied probe and
material in which sound waves propagate. A sound beam can be roughly divided
into a convergent (focusing) area, the near-field, and a divergent
(spreading) part, the far field, Fig. 3. The length N of the
near-field (near-field length) and the divergence
angle is dependent on the diameter of the element, its frequency and
the sound velocity of the material to be tested. The center beam
is termed the acoustic axis.
The shape of the
sound beam plays an important part in the selection of a probe for solving a
test problem. It is often sufficient to draw the acoustic axis in order to show
what the solution to a test task looks like. A volumetric discontinuity (hollow
space, foreign material) reflects the sound waves in different directions,
Figs. 4a + 4b.
|
Fig. 4a Volumetric discontinuity - straight-beam probe |
Fig. 4b Volumetric discontinuity - angle-beam probe |
The portion of
sound wave which comes back to the probe after being reflected by the
discontinuity is mainly dependent on the direction of the sound wave; i.e. it
does not matter whether scanning is made with a straight-beam probe or an
angle-beam probe or whether it is carried out from different surfaces on the
test object, Fig. 5. If the received portion of the reflected sound wave from
the probe is sufficient then the detection of the existing volumetric
discontinuity is not critical, this means that the operator is able to detect
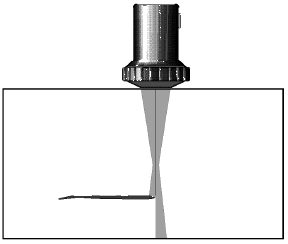
it by scanning from different directions. A plane (two-dimensional)
discontinuity (e.g. material separation, crack) reflects the ultrasonic waves
mostly in a certain direction, Fig. 6.
|
Fig. 5 Volumetric flaw - detection form different directions |
Fig. 6 Reflection on angled plane discontinuity |
If the reflected
portion of the sound wave is not received by the probe then it is unlikely that
the discontinuity will be detected. The possibilities of detection only
increase when the plane discontinuity is hit vertically by the sound beam. This
applies to discontinuities which are isolated within the test object.
|
Fig. 7 Apparent
deformation of the sound beam on a side wall |
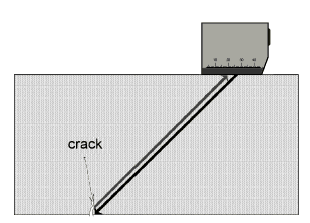
With plane
discontinuities which are open to the surface of the test object, e.g. a crack
running vertically from the surface into the test object, a vertical scan of
the crack does not always produce the required success. In this case wave overlapping
occurs (interferences) due to sound wave reflection on the side wall of the
test object which seems as if the sound wave bends away from the corresponding
side wall, Fig. 7. In such cases, the probability of crack detection is very
good if the angle reflection effect is used, Fig. 8a. At the
90° edge, between the crack and the surface of the test object, the sound waves
are reflected back within themselves due to a double reflection, Fig. 8b. Use
of the angle reflection effect is often even possible when a plane
discontinuity, which is vertical to the surface, does not extend to the surface
and under the condition that the sound wave reflections at the discontinuity
and the surface are received by the probe, Fig. 9.
|
Fig. 8a Crack detection with 45° scanning |
|
|
|
|
Fig. 10a Angle reflection effect |
Fig. 10b Tandem testing: center zone |
Fig. 10c Tamden testing:
lower zone F |
Often in
thick-walled test objects, in which there are vertical discontinuities, this
condition cannot be fulfilled so that the reflected sound waves from the
discontinuity and the surface of the test object do not return to the probe. In
this case, a second probe is used for receiving the reflected portions of sound
thus enabling detection of the discontinuity.
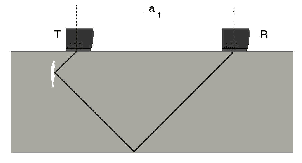
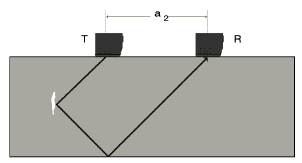
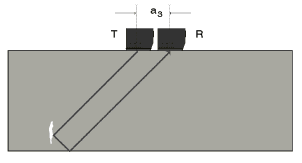
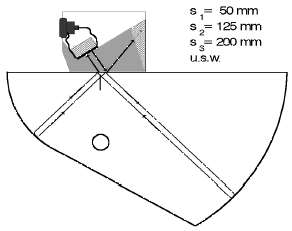
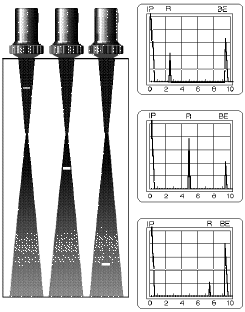
With this type
of testing, the Tandem Technique, one probe is used as a
transmitter, and the other probe is used as the receiver. Both probes are moved
over the surface of the test object and are spaced apart at a fixed distance.
Scanning is made for vertically positioned discontinuities at different depths
of the test object, depending on the probe spacing, Figs. 10a, 10b and 10c.
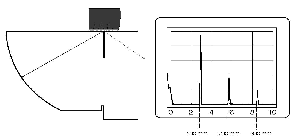
Although, with
angle scanning in thin test objects, there is a possibility that plane
discontinuities cannot be vertically hit, Fig. 11 a, the detection sensitivity
is much better, especially by suitable selection of the scanning angle and the
test frequency so that the user favours the single probe test as
opposed to the more complicated tandem method. This is normally the case when
testing welds up to a thickness of about 30 mm.
Of course the
possibility of detecting discontinuities which are not vertically hit is
reduced. However, this deficiency is often compensated by an additional test
with another angle of incidence, Fig. 11 b, or by using a probe with a lower
frequency, Fig. 11 c. A typical procedure can be found in the corresponding
specifications (test instructions) for weld testing.
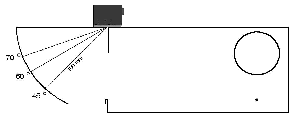
|
Fig. 11a 70° scanning: unfavourable angle |
Fig. 11c 70° scanning with 2 MHz; detection by large
divergence of the sound beam |
|
Fig. 11b 45° scanning: favourable angle |
Method of testing and
instrument technology
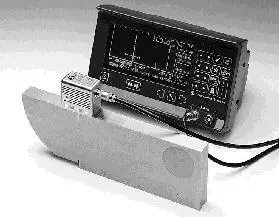
The
ultrasonic flaw detector
Before we
concern ourselves with further test tasks and their solutions, we must firstly
acquire more detailed knowledge about the most frequently applied ultrasonic
technique, including test instruments and probes. Based on what has already
been stated concerning the location of discontinuities, we must transmit short
sound pulses into the test object in order to measure the sound pulse's time of
flight from the probe to the reflector and back. This is only possible when
there is a clearly defined start time and target time. As long as the test
object's sound velocity is known it is then possible to determine, using simple
calculation, the distance of the reflector and thus its exact position in the
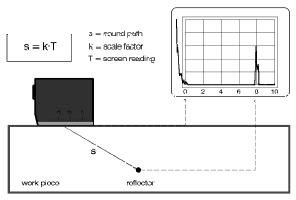
test object, Fig. 12.
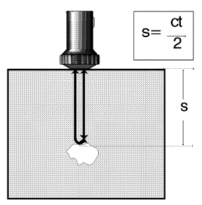
Sound
reflections in the audio range are called echoes (think of
the yodeler in the mountains). Therefore
why should we not use this short appropriate term for the reflection of an
ultrasonic pulse? Thus the name of the method came into being which is applied
in most areas of application for material testing with ultrasonics:
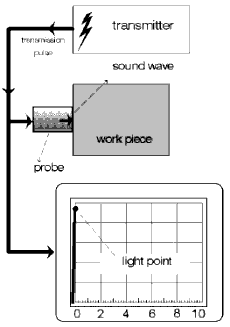
the Pulse Echo Method, Fig. 13.
|
Fig. 12 The priciple of
time of flight measurement |
Fig. 13 Block diagram: Pulse Echo Method |
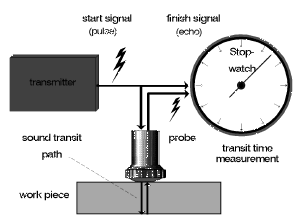
The time
measurement starts with the electrical transmission pulse, the initial
pulse. This is an extremely short electrical discharge which triggers a
sound pulse at the probe crystal. This pulse travels through the material and
is reflected by a discontinuity or the opposing wall and returns back to the
probe. The received oscillations are converted into an electrical pulse which
stops the time measurement. The distance to the reflector can now be instantly
determined by the following formula:
|
|
s = sound path [mm] c = sound velocity [km/s] t = time of flight [ms) |
|
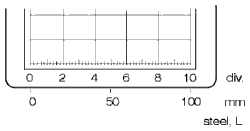
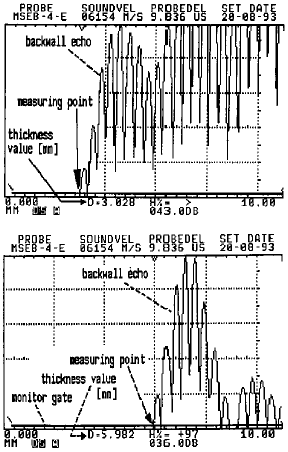
Fig. 14 Ultrasonic Testing
in
practice Fig.
15 The Display scale |

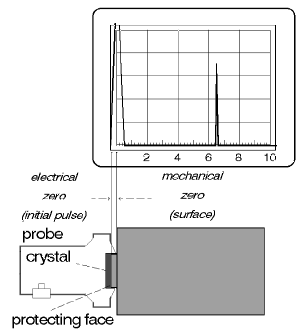
If the time of
flight is graphically displayed then we are not far from the universal Ultrasonic
Flaw Detector, Fig. 14. In order to evaluate the visual signals (echoes) on
the screen there is a grid on the inside of the CRT. The exchangeable
attachment scale, which has a horizontal scale with 10 graduations is called
the display scale, Fig. 15. Using this scale, the ultrasonic
operator is able to measure echoes on the display.
How is this
done? As already stated, the electrical transmission pulse triggers the sound
pulse at the probe crystal. At the same time this voltage pulse is feed to the
input of the amplifier so that the high voltage causes a vertical deflection of
the display sweep, this is called the initial pulse, Fig. 16a. With this
initial pulse, the sweep starts in the lower left corner of the display
synchronous to the start of the sound pulse in the test object and moves along
the base lineat a constant speed to the right, Fig. 16b.
|
|
|
The speed of the
pulse is dependent on the material of the test object (sound velocity =
material constant). The sweep speed of the instrument's
display can be varied within wide limits. Thus the speed of the display sweep
can be exactly matched to the sound velocity. In our example the electron beam
reaches scale division 4 while the pulse is at the opposing side of the test object,
Fig. 17 a, then it will of course need the same time to return, i.e. the beam
spot will be at the 8th scale graduation, Fig. 17 b.
The part of the
sound pulse, which is transmitted through the couplant and
into the probe, generates a small electrical reception signal at the crystal
which, via the amplifier, causes vertical deflection of the beam spot, this is
the backwall echo Fig.
18.
|
|
|
|
The deflection
takes place quickly because the sound pulse is short, therefore can only
trigger a short voltage pulse at the probe crystal. The electron beam returns
quickly back to the base line and continues to the right, whilst the largest
part of the sound pulse is reflected at the coupling surface and travels
through the test object a second time. The display indications can now be
allocated into two measurement values:
1. Horizontal position.
2. left flank of the echo at
the 8th scale graduation
3. Vertical amplitude:
4. 70% screen height
At the moment
this does not tell us very much, however, later we will see that nearly all
usable results which we obtain from ultrasonic testing are based on these two
readings. Let us take a look more closely at the current result: The high
initial pulse starts at the left in front of the scale zero point. The rising
flank corresponds to the time at which the electrical signal is on the crystal
and starts the sound pulse. However, before it is fed to the surface of the
test object it must travel through the protection layer of the probe (probe
delay). Although it is relatively thin, a short period of time is required.
The initial pulse is exactly shifted to the left by this period of time, Fig.
19a.
|
|
|
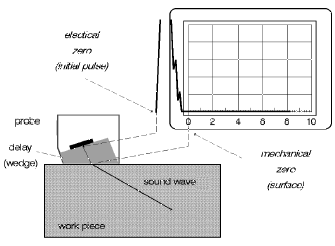
With angle-beam
probes the sound pulse in the probe must travel through a much longer delay
path made of perspex before it is
transmitted into the test object. Depending on the type of probe, the initial
pulse delay can be so large that it no longer appears on the display, Fig. 19
b. We already explained the echo at the 8th scale graduation before: It is the
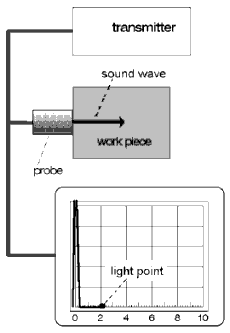
pulse reflected at the opposite wall of the test object, the backwall echo. Now it is not too difficult to guess
how the display changes when there is another reflector within the sound beam,
e.g. a material separation: between the initial pulse and the backwall echo another echo will appear, caused by
partial reflection of the sound wave on a discontinuity, Fig. 20.
Such an echo is
called an intermediate echo. It is easy to foresee the position
changes of the intermediate echo on the display if the reflector is at
different depths. Fig. 21 a+b: the position of
the intermediate echo on the display in relation to the position of the backwall echo behaves the same as the distance of the
discontinuity related to the total thickness of the test object. We already
know a method of determining the distance of an internal flaw; the ultrasonic
tester speaks of location of the discontinuity.
|
|
|
Fig. 21b Discontinuity near the surface |

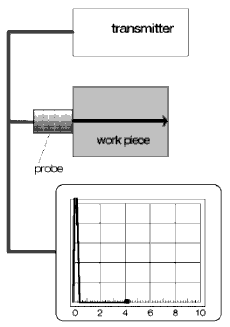
Near resolution
So, what can we
do when a small discontinuity is just below the surface of the test object,
i.e. directly in front of the probe? Can this discontinuity still be detected?
The answer is no, because the intermediate echo is now within the initial
pulse, it is therefore covered by it. Probably there are also no further
indications that there is a near-to-surface discontinuity here, Fig. 22.
|
|
|
Fig. 24 Echo sequence of a near-to-surface discontinuity |


Or do we perhaps
have a clue which will lead us to the unseen intermediate echo (a
near-to-surface discontinuity)? The answer is yes, when the discontinuity is
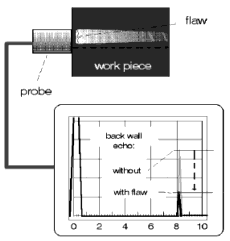
large enough and shadows a noticeable part of the sound beam so that the backwall echo becomes smaller, Fig. 23. If the
near-to-surface discontinuity is also smooth and parallel to the surface, then
there is an echo sequence which is more or less well formed because the pulses
are reflected many times between the surface and the discontinuity, Fig. 24.
|
|
In this case,
the amplitudes of the echoes become smaller as the distance increases.
The more dense the flat echoes advance to
the surface, the more the echoes of the echo sequence disappear into the
initial pulse, this causes the echoes to become even more dense. In such cases
there is a limit to detection.
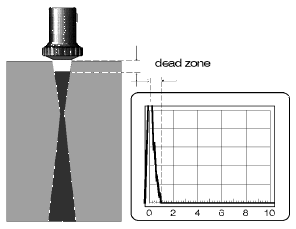
From everything,
we see that the initial pulse is not welcome on the display, however it is a
technical necessity: it limits the detectability of near-to-surface
discontinuities. Reflectors in the dead zone, the non-testable area
immediately beneath the surface, can no longer be detected, Fig. 25. The dead
zone is dependent on the test setup, this means from the probe and the test
instrument. However, it can be minimized by suitable selection of the testing
device.
The probe
Probes whose
beams are normal to the surface are called straight-beam probes,
Figs. 1a and 26. Most standard
straight-beam probes transmit and receive longitudinal waves (pressure waves).
The oscillations of such a wave can be described by compression and
decompression of the atoms propagating through the material (gas, liquid and
solid), Fig 27.
|
|

Fig. 27
Longitudinal wave
There is a large
selection of straight-beam probes in various sizes and range from frequencies
of approximately 0.5 MHz to 25 MHz.Distances of
over 10†m can be obtained thus enabling large test objects to be tested. The
wide range enables individual matching of probe characteristics to every test
task, even under difficult testing conditions. We have already mentioned a
disadvantage of straight-beam probes which, under certain conditions, can be
decisive: the poor recognition of near-to-surface discontinuities due to the
width of the initial pulse.
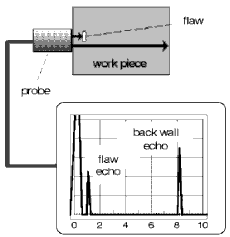
Probes whose
beams enter at an angle are called angle-beam probes because
they transmit and receive the sound waves at an angle to the surface of the
test object, Figs. 1b and 28. Most standard
angle-beam probes transmit and receive, due to technical reasons, transverse
waves or shear waves. With a transverse wave the atoms or
molecules oscillate vertical to the wave's direction of propagation, Fig. 29,
due to the fact that excitation is made by shear force (transverse to the
propagation's directive forces).
|
|
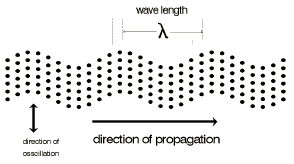
Fig. 29
Transverse wave
Transverse waves
only occur in solid materials never in liquids or gases because these do not
have a shear modulus and therefore do not effect any
shear forces. In addition to this, they propagate much slower than longitudinal
waves in the same material. There is no quick reply to the question about why
angle-beam probes do not transmit longitudinal waves. In this case a detailed
examination is required.
Refraction and
mode conversion
Inclined sound
waves are almost exclusively generated so that they occur at an angle to the
probe/test object interface, Fig. 1b. This is simply achieved by cementing the
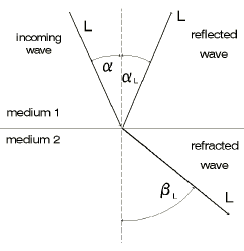
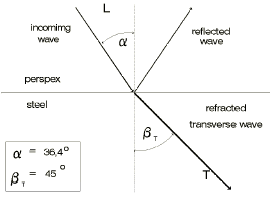
element onto a wedge shaped delay path which is normally made of perspex. If a longitudinal wave, at a fixed angle of
incidence (the wedge angle), hits the perspex/steel
interface then this wave is firstly split-up into a reflected and a transmitted
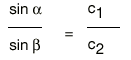
wave, Fig. 30a. Reflected waves obey the reflection law (angle of incidence =
angle of reflection) and transmitted waves the refraction law (Snell's law):
|
|
a = angle of incidence b = angle of refraction c 1 = sound velocity in medium 1 c 2 = sound velocity in medium 2 |
|
|
|
|
Fig. 31 Evaluation: one
echo - two possible reflector locations |
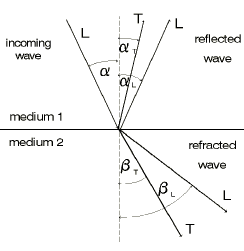
Moreover
something strange happens: In addition transverse waves are created at the
sound beam's point of impact, Fig. 30b. This happens with reflection as well as
with refraction! Due to the fact that the transverse waves propagate at around
only half the sound velocity of longitudinal waves, other propagation
directions are automatically produced due to the refraction law, i.e.
reflection and refraction angles.
If, with
inclined scanning, this wave conversion is not taken into consideration, then
location and evaluation of discontinuities is not possible in many cases, even
detection becomes questionable because one echo on the display leads to two
different reflector locations depending on whether one takes longitudinal waves
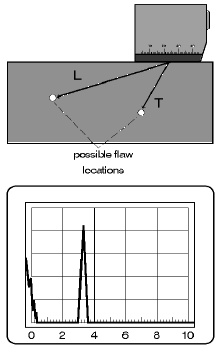
or transverse waves as a basis, Fig.31.
But where is the
discontinuity? A clear answer can only be given by the operator when one of the
wave modes does not occur. That is undoubtedly the precondition for the
universal application of angle-beam probes. This precondition can be derived
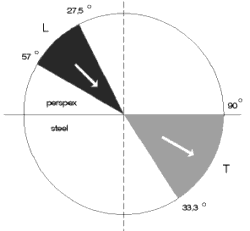
from the refraction law: firstly we recognize that the refraction angle of
longitudinal waves is for steel approximately twice as large as that of the
transverse waves, Fig. 30b.
With further
enlargement of the angle of incidence the angle of refraction balso increases until finally, at an angle of
incidence of a = 27.5° (1st critical angle) , the longitudinal
wave, with an angle b of 90°, is refracted. This means that it runs along the
interface whilst the transverse wave is still transmitted into the test object,
Fig 32a.
|
|
|
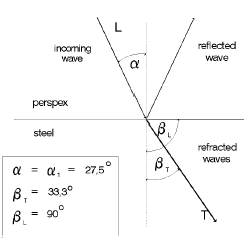
Our precondition
for clear reflector evaluation is fulfilled: now only one sound
wave occurs in the test object, this is the transverse wave with a refraction
angle of 33.3° (for perspex/steel). With further
enlargement of the angle of incidence various refraction angles of the
transverse wave (= beam angle) can be set, e.g. exactly 45°,
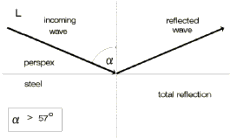
Fig. 32 b. Finally, with an angle of incidence of about 57° (2nd
critical angle) , the transverse wave, with an angle of 90°, is
refracted and propagates along the surface of the test object, it then becomes
a surface wave, Fig. 32 c.
That is the
limit over which no more sound waves are transmitted into the test object.
Total reflectionstarts from here, Fig. 32d.
The area in which an angle of incidence is present between the 1st and 2nd
critical angle (27.5° - 57°) gives us a clear evaluable sound wave in the test
object (made of steel), namely the transverse wave between 33.3° and 90°, Fig. 33.
|
Fig. 32c Refraction: 2nd critical angle, surface wave |
Fig. 32d Total reflection |
|
Characteristics
of angle-beam probes
Due to the fact
that steel is tested in most applications, the angle-beam probes are designed
so that suitable angles of incidence are produced in steel. To achieve clear
evaluation there are angle-beam probes with angles of 35°, 45°, 60°, 70°, 80°
and 90° (surface waves), Fig. 33.
Angles of 45°,
60° and 70° are mostly used. With regard to frequency, angle-beam probes do not
have such a wide selection as straight-beam probes. This is primarily due to
the fact that high frequency transverse waves in non-alloyed fine grain steels
are subjected to high attenuation. As the sound energy of the wavestravels through the material it is so strongly absorbed
and scattered that only relatively small test objects can be tested with
sufficient sensitivity.
If
discontinuities have to be detected over larger distances (in thicker test
objects) then angle-beam probes with larger crystals and lower frequencies are
to be used; e.g. a reflector with a size of 2 mm in low alloyed fine grain
steel with a 2 MHz angle-beam probe with a large crystal can be detected up to
a distance of 700 mm. The near resolution of angle-beam probes
is often better than with straight-beam probes because the initial pulse is
shifted far to the left due to the relatively large perspex delay
path. The falling flank of the initial pulse could sometimes still cover
near-to-surface discontinuities. Figs. 34a+b show, when using an angle-beam
probe, how a near-to-surface drilled hole (1 mm deep) can be reliably detected.
|
Fig. 34a Scanning a 1 mm transverse hole at a depth of 1 mm |
Fig. 34b Detection of a hole with a MWB70-4E |
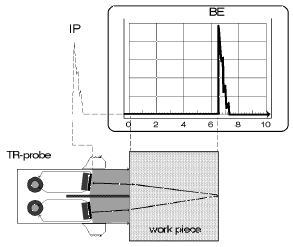
The TR probe
|
|
If you want to
obtain a similarly good near resolution with straight-beam scanning you should
use a TR probe, Fig. 35. This technique uses two crystal elements
which are acoustically and electrically separated from each other in the same
housing. In addition to this, both elements are stuck to a relatively long
delay path (made of perspex) and are slightly
inclined towards each other. Connection of the TR probe on the instrument is
made in the TR or dual mode, i.e. one element is
connected to the transmitter and the other with the input of the receiver
amplifier. The initial pulse is positioned far left of the display due to the
long delay path, Fig. 36.
Multi-reflections
within the delay path of the transmitter do not interfer because
the transmitter element does not have any reception function. Only when the
sound pulses come out of the test object and into the receiver element of the
TR probe do evaluatableechoes appear on the
display.
|
Fig. 36 TR probe on the test object: CRT with backwall echo |
Fig. 37 TR probe on the test object: discontinuity echo in the
cross-talk echo |
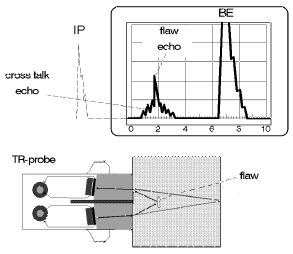
The electrical
and acoustic separation is, due to technical reasons, not completely possible.
Especially high gain adjustments and rough test object surfaces cause portions
of sound to be directly transferred from the transmitter to the receiver. This
generates an interference echo on the display which is called the cross-talk
echo. The cross-talk echo can exactly cover the near-surface area of the
test object and once again there is a loss in detection sensitivity, especially
of small discontinuities. However, most cross-talk echoes are so small, or even
negligible, that they can be clearly distinguished from possible discontinuity
echoes, Fig. 37.
|
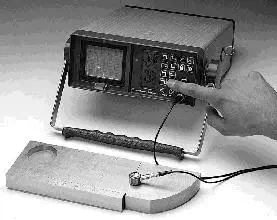
Fig. 38 Wall thickness
measurement with a digital thickness gauge in practice |

TR probes are
therefore ideally suited for the detection of near-to-surface discontinuities
and for thickness measurements on thin test objects. The TR probe reacts
considerably less sensitive to coupling variations which may be caused by rough
or curved material surfaces. This characteristic explains why TR probes play a
valuable part in the chemical and energy generating industries: they are ideal
for testing all types of tubes and containers, for the detection of
discontinuities in tube walls, and for measurements of inside corrosion and
remaining wall thicknesses. Special high temperature probes are even able to
measure the wall thickness on test object surfaces up to about 550°C so that
installations can be tested during operation.
5. Locating discontinuities
Calibration
of the instrument
The location of
a discontinuity can be instantly determined using its echo if the instrument is
correctly calibrated. Calibration means, linear display, from the
zero point on the scale, of a certain distance range of the object to be
tested. The zero point on the scale corresponds to the surface of the test
object and the 10th scale graduation the maximum distance, e.g. 100 mm steel,
10 mm aluminum, 25 mm brass etc. When specifying
the calibration rangethe naming of the material is also important
because the displayed distance of the echo, sound path s, is always
deduced from the time of flight t of the pulse and the sound velocity c
according to the equation:
|
|
s = sound path [mm] c = sound velocity [km/s] t = transit time [ms] |
|
|
This
relationship is not unimportant for the ultrasonic operator but it is not
required for the sequence of calibration. The rule simply says: Use a work
piece of the same material as the test object whose dimensions are known. By
coupling the probe onto an object of known thickness t an echo sequence appears
on the display, Fig. 39. The associated sound paths correspond logically to the
paths being travelled in the test object, for example with a straight-beam
probe it is the multiple of the test object's thickness t, therefore:
○ 1st Echo = t,
○ 2nd Echo = 2t,
3rd Echo = 3t,
etc.
We must now
adjust 2 of these echoes on the corresponding scale graduation to the required
calibration range. The instrument is then calibrated, i.e. by reading off the
scale position T the sound path s (distance) of the associated reflector can be
determined (location of reflectors, wall thickness measurement).
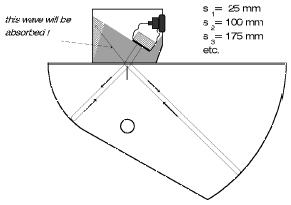
Calibration
with a straight-beam probe
The reference
piece used for calibration is called the Calibration Block,
or Standard Calibration Block, if the block used is standardized.
The Standard Calibration Block 1, also simply referred to
as V1 block (according to BS 2704 - A2), has a thickness of
exactly 25 mm and is made of low-alloyed fine grained steel so that it can be
used for nearly all types of calibration when similar steels are to be tested.
Example 1: Calibration range 100 mm
steel (longitudinal waves)
|
|
The 10 scale
graduations on the horizontal display scale are to have a range of 0 to 100†mm
steel, Fig. 40. One scale graduation therefore corresponds to 10 mm in the test
object. We say: the scale factor k (display scale) is 10 mm
per scale graduation. We couple the straight-beam probe to the V1 block (laying
flatwise), Fig. 39. The backwall echo
sequence now comes from the 25 mm steel path. The allocation of sound
paths si to the corresponding
scale positions Tiiscarried out using
the calibration table:
|
Echo-No i |
Sound path si [mm] |
Scale factor k [mm/scalegrad.] |
Skalen-position Ti [scale grad.] |
|
1 |
25 |
10 |
2.5 |
|
2 |
50 |
10 |
5.0 |
|
3 |
75 |
10 |
7.5 |
|
4 |
100 |
10 |
10.0 |
The
corresponding scale position Ti is
calculated by using the formula:
|
|
si = sound path of
umpteenth echoes Ti = scale position of
the umpteenth echo k= scale factor |

|
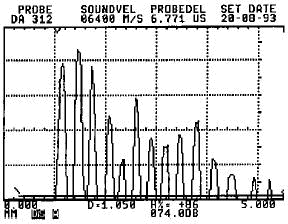
Fig. 41 USK 7: Calibration in the 100 mm range |
Fig. 42 USK 7 D: Consideration of the probe delay |
The exact
adjustment of echoes from the calibration block, as in Fig. 41, is made
with analog ultrasonic flaw detectors using
the controls pulse shift (or delay) as well as coarse
and fine ranges. In doing this, the adjustments must be alternately carried
out at these points until the echo flanks are at the correct scale positions.
With modern digital instruments the calibration range of 100 mm and the sound
velocity of 5920 m/s are firstly entered. After coupling the probe to the
calibration block, the function delay or probe delay is
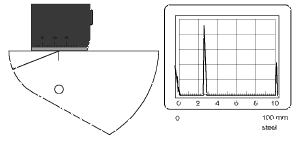
changed until the echoes are correctly positioned, Fig. 42.
Example
2: Calibration
range of 250 mm in aluminum
10 scale
graduations correspond to 250 mm in aluminum: k
= 25 mm/graduation. We couple the straight-beam probe to an aluminumtest block which is 80 mm thick, i.e. a backwall echo sequence is produced from this thickness
(t = 80 mm), Fig. 43.
The calibration
table now looks like this:
|
Echo-No i |
Sound path si [mm] |
Scale factor k [mm/scalegrad.] |
Skalen-position Ti [scale grad.] |
|
1 |
80 |
25 |
3.2 |
|
2 |
160 |
25 |
6.4 |
|
3 |
240 |
25 |
9.6 |
Exact reflector
location is only possible after correct calibration of a test instrument. The
ultrasonic operator moves the probe over the test object. In a normal case,
i.e. when a discontinuity does not exist, only the initial pulse and the backwall echo are visible on the display. As soon as a
discontinuity is within the area of the sound beam, an additional echo appears
between the initial pulse and the backwall echo,
Fig. 44, e.g. an echo at scale graduation 1.4. With calibration in the 250 mm
range the distance to the reflector s is therefore 1.4 x 25 = 35 mm.
|
Fig. 43 USK 7 D: Calibration of a 250 mm range with an 80
mm aluminum path |
Fig. 44 USK 7 D: Sound path measurement. |
Calibration
with a TR probe
For technical
reasons, the calibration with a TR probe can only be made to a certain extent
using a backwall echo sequence from a
comparison object. Due to the slight angular beaming, Fig. 35, transverse waves
occur with the TR probe which cause strong interference behind the 1st backwall echo so that the 2nd backwallecho
is often unable to be identified. Therefore, a stepped calibration block is
used for the adjustment of both echoes, alternately going between two steps (2
point calibration).
Example
3: Calibration
range for 10 mm steel
Step block VW
(steel: 1 - 8 mm). The 3 mm and 6 mm steps should be used for calibration. The
step selection depends on the depth range of the expected reflectors. Here the
echo from 3 mm must be adjusted to the 3rd scale graduation and the echo from 6
mm to scale graduation 6, Fig. 45a+b.
|
a) |
Firstly, we couple the TR probe to the 3†mm step and use the
delay control for adjusting the echo flank to the 3rd scale graduation. |
|
b) |
Now we couple the probe to the 6 mm step and bring the echo to
the 6th scale graduation with the range control. |
|
c) |
Steps a) and b) are alternately repeated until both echo
flanks are exactly on the 3rd and 6th scale graduations, Fig. 45a+b. |
The main
application of TR probes are wall thickness measurements, but they are also
suitable for the detection of near-to-surface discontinuities, Fig. 46a+b.
|
|
|


Calibration
with an angle-beam probe
For calibration
of the test instrument with an angle-beam probe the standard calibration block
1, Fig. 47a, and the calibration block V2 (according to BS 2704 - A4), Fig.
47b, are almost exclusively used because no backwall echo
sequence is received due to the angular beaming from a plane-parallel
calibration block.
|
|
|
The advantage
with echoes from the circle segment of the calibration block is that the same
sound path is always given independent of the probe angle, Fig. 48. When the
angle-beam probe is exactly coupled in the center of
the circle segment, a first echo is exactly received from 100 mm out of V1
block. According to the reflection law, the sound waves coming out of the arc
are reflected away from the coupling surface to the back, this means away from
the arc, Fig. 49a. A second echo out of the arc, needed for the calibration
sequence, cannot therefore be produced. For this, there are two saw cuts made
in the center of the quarter circle: in the
edges, which these saw cuts form with the surfaces, the sound waves are
reflected back within themselves due to double reflection (angle
reflection effect)so that
they go back to the arc, Fig. 49b.
Because the
radius of the circle segment is exactly 100 mm we will regularly receive an
echo sequence with distances of 100 mm, 200 mm, 300 mm etc. with which we are
able to carry out calibration of the test instrument the same way as the
straight-beam probe. Fig. 50 shows calibration of the 250 mm range.
|
|
|
For the
miniature angle-beam probe one uses the considerably smaller and lighter
Standard Calibration Block 2 (V2 block). This has, as opposed to the V1 block,
two circle segments with a common center point,
however it does not have saw cuts. The required echo sequence is produced here
by the alternating reflection of the sound waves, Fig. 51a+b.
|
|
|
The
corresponding echo sequence is produced according to whether the probe beams
into the 25 mm radius or the 50 mm radius. No echoes appear with sound paths by
which the sound pulses from the "wrong" direction meet at the center point because these pulses are absorbed by the
front damping element of the probe. Fig. 52 shows calibration of the 100 mm
range by scanning into the 25 mm radius of Standard Calibration Block V2.
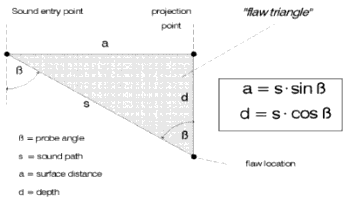
Locating
reflectors with an angle-beam probe
|
|
The echo of a
discontinuity on the instrument display does not now give us any direct
information about its position in the material. The only available information
for determination of the reflector position is the scale position and therefore
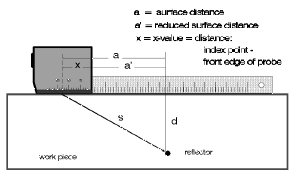
the sound path s, this means the distance of the discontinuity from the index
point(sound exit point) of the probe, Fig. 53.
The mathematics
of the right-angled triangle helps us to evaluate the Surface Distance and
the Depth of a reflector which are both important for the
ultrasonic test, Fig. 54a. We therefore now have the possibility to instantly
mark a detected flaw's position on the surface of the test object by
measurement of the surface distance from the sound exit point and to give the
depth. For practical reasons, the reduced surface distance is
used because this is measured from the front edge of the probe. The difference
between the surface distance and the reduced surface distance corresponds to
the x-value of the probe, this is the distance of the sound exit
point to the front edge of the probe, Fig. 54b.
|
|
|
|
|
With ultrasonic
instruments having digital echo evaluation these calculations are naturally
carried out by an integrated microprocessor and immediately displayed so that
the operator does not need to make any more time-consuming calculations, Fig.
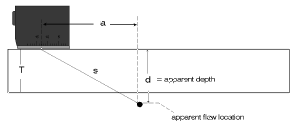
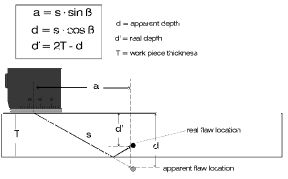
55. This is of great help with weld testing because with the calculation of the
flaw depth an additional factor must be taken into account, namely: whether the
sound pulses were reflected from the opposing wall. If this is the case then an apparent
depth of the reflector is produced by using the depth formula which is
greater than the thickness T of the test object. The ultrasonic operator
must acertain whether a reflection comes
from the opposite wall and then proceed with calculating the reflector depth,
Fig. 56b.
|
|
|
Locating
reflectors with an angle-beam probe
The echo of a
discontinuity on the instrument display does not now give us any direct
information about its position in the material. The only available information
for determination of the reflector position is the scale position and therefore
the sound path s, this means the distance of the discontinuity from the index
point(sound exit point) of the probe, Fig. 53. The mathematics of the
right-angled triangle helps us to evaluate the Surface Distance and
the Depth of a reflector which are both important for the ultrasonic
test, Fig. 54a. We therefore now have the possibility to instantly mark a
detected flaw's position on the surface of the test object by measurement of
the surface distance from the sound exit point and to give the depth. For depth of
the reflector is produced by using the depth formula which is greater than the
thickness T of the test object. The ultrasonic operator must acertain whether a reflection comes from the opposite
wall and then proceed with calculating the reflector depth, Fig. 56b.
Evaluation of
discontinuities
Of course, a
discontinuity is best evaluated when its size (extension) is known. The
operator's wish to accurately know the "real reflector size" is
understandable therefore it is expected that annondestructive testing method, such as ultrasonic
testing, give this information. However, due to the fact that on the display
only the echo can be interpreted, this means the reflected sound coming from
the discontinuity, it is very often difficult, and in some cases even
impossible, to reliably assert the size of the reflector. In fact, the echo
height plays the decisive part when evaluating discontinuities during manual
Ultrasonic Testing.
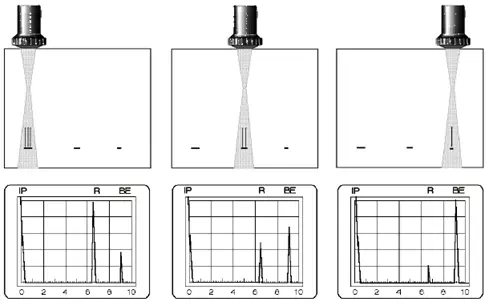
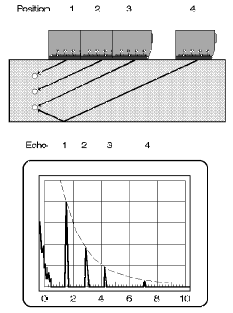
Scanning method
In ultrasonic
evaluation one is frequently able to come near to the true reflector size as
long as the discontinuity is large compared to the diameter of the sound field.
The discontinuity then reflects the complete impacting energy back, Fig. 57. By
scanning the boundaries of the discontinuity, reliable information can be
obtained about its extension. The ultrasonic operator normally observes the
height of the discontinuity echo. The probe position on the test object at
which the echo drops by exactly half indicates that the discontinuity is only
being hit by half the sound beam, Fig. 58a.
|
|
|
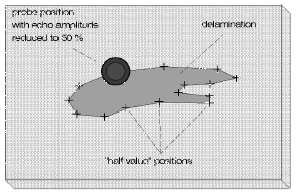
This means that
the acoustic axis is exactly on the boundary of the discontinuity. The probe
position is marked and the operator determines further boundry points
until a contour of the discontinuity is formed by joining the marked points
together, Fig. 58b. Location of the reflector boundry becomes
more exact the smaller the diameter of the sound beam is at the reflector
position. Therefore, if the reflector extension is to be exactly measured it is
recommended that a probe be selected which has its focal point at the same
distance as the reflector. TR probes are especially suited which have a
hose-shaped sound beam with a small diameter (1 - 3 mm) at their most sensitive
depth range.
Evaluation of
small discontinuities: The DGS method
A reflector
which is completely contained within the sound beam is regarded as a small
reflector. If such a reflector is evaluated by scanning then it is not the
size of the reflector which is obtained as a result but the diameter of the
sound beam! Therefore, the scanning method is not practical in this case. We
have noticed previously that the height of a reflector echo will become greater
the larger the sound beam area is which covers the reflector. This feasible
behaviour can be used on small reflectors: their echo heights increase with
their areas, Fig. 59.
|
|
|
|
Under optimal
conditions, e.g. drill holes with flat bottoms and at equal depths, this law can
be confirmed:
|
The echo heights are proportional to their
area or The echo heights are proportional to the square of their diameter. |
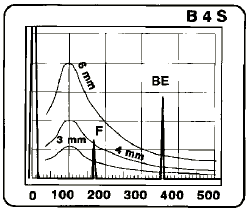
Example: The
flat-bottom hole with a diameter of 2 mm has an echo which is 4 times that of a
1 mm flat-bottom hole because the area has quadrupled. However, if the echoes
from two drill holes at different depths are compared then an additional
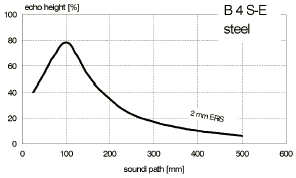
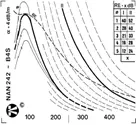
distance dependence of the echo heights is established, Fig. 60.
With accurate
tests using flat-bottom holes at different depths a simple law can be found, at
least in the far field of the applied sound beam:
|
The echo heights reduce to the square of
their distance |
This does not
normally apply to the near-field of the sound beam! Here, the test results show
that the echo heights within the focus reach their highest amplitude and are
reduced again at shorter distances, Fig. 61.
|
|
|
If such curves
are put on transparent scales having the CRT format then we immediately have
the possibility to comparatively evaluate echoes from unknown reflectors and
those from natural reflectors, i.e. the echo height of the discontinuity is
compared to that of a circular disk. The discontinuity in Fig. 62 reflects the
sound waves the same as a circular disk having a diameter of 4 mm. Due to the
fact that we can only assess the sound reflected from the discontinuities we
must of course not equate the diameter of 4 mm with the "true size"
of the discontinuity. We therefore refer to them as anequivalent disk-shaped
reflector or as equivalent reflector size (ERS) . The equivalent
reflector size only corresponds to the true reflector size of a discontinuity
in an ideal case which is when it is circular and exactly hit vertical to the
acoustic axis.
In practise this
almost never occurs which means that the true size of a discontinuity is
normally larger than the equivalent reflector size. A law for
this cannot be derived because the echo height is strongly dependent on the
characteristics of the discontinuity, this means its geometry, orientation to
the sound beam and the surface quality. For example, a pore (spherically shaped
gas inclusion) with a diameter of 2 mm has an equivalent reflector size of 1
mm; an angled flat reflector 5 mm long gives, according to orientation, a
result of ERS 0 (not detectable) to perhaps ERS 2.
This uncertainty
in the evaluation of the discontinuity is however neutralized when other
possibilities and techniques in ultrasonic testing are used to inspect detected
discontinuities closer. An experienced ultrasonic operator can, without
additional expense, accurately give information about the discontinuity which
he has detected. Scanning the discontinuity from different directions,
assessing the echo shape and the behavior of
the display when moving the probe (echo dynamics) are just a
few techniques which can be successfully applied.
Despite the
remaining uncertainty with evaluation of natural discontinuities the above
method of discontinuity evaluation is applied in many countries due to the fact
that the method is based on well proven laws in the sound field. It is
therefore reproducible, i.e. the evaluation results are independent
of testing device and operator.
The socalled DGS scales or discontinuity
evaluation can be obtained from the probe manufacturer for many probes and
various calibration ranges. DGS means that the scale is allocated an echo at
the Distance, with correctly set Gain and (equivalent reflector) Size. However,
the modern version of the DGS scale would need some explanation because it was
developed to fulfill the requirements of
the most common specificationsin practical
testing: If, on a certain test object whose purpose and therefore stress values
are known, an ultrasonic test is to be carried out then firstly, if necessary
with destructive testing, it should be established how large the permitted
material flaw should be. Of course, the position of such a flaw in the material
and its rate of occurance play a part.
If a permitted
flaw size has been determined then this size is multiplied with the safety
factor which, amongst others, also takes the evaluation uncertainty of the
ultrasonic test into account. The corresponding echo amplitude curve for this
size is now of importance for the ultrasonic test. The ultrasonic operator
scans the test object with the probe and only needs to record the indications
which exceed this recording curve, Fig. 63.
|
|
|
Consequently,
only one curve is necessary for the evaluation. Due to the fact that, depending
on the application, different recording limits occur, it must
be possible to allocate other equivalent reflector sizes to this curve. This
allocation is shown by a table positioned at the top right of the scale:
starting from a defined default setting of the instrument, the auxiliary
gain is taken from the table which belongs to the required recording
value and added to the gain controls. If the correct range calibra tion has been
made then test object scanning can now begin. When an indication from the test
object exceeds the recording curve then this result is to be recorded in
writing and evaluated. If required, the test instructionsprovide
the following measures: rejection, repair or further tests for exact assessment
of the discontinuity (diagnosis) .
Fig. 64 shows
testing of a forged part. The recording curve corresponds to Equivalent
Reflector Size 3. The detected discontinuity, at a depth of 110 mm, exceeds the
curve, i.e. all reflector data must now be recorded into a predetermined form.
Sound
attenuation
In addition to
the laws which establish the behaviour of disk shaped reflectors within the
sound beam of a probe (distance and size laws) another effect
can be observed: The sound attenuation. The sound attenuation is
caused by the structure of the test object but is also strongly dependent on
the frequency and the wave mode of the applied probe. Only when these effects
are known can they be considered by the discontinuity evaluation. However, the
evaluation becomes more difficult, timeconsuming and
more unreliable so that DGS evaluation can be burdened with tolerances which
are too great.
The reference
block method
These
uncertainties in evaluation can be reduced when there is a socalled reference block available which
is made of the same material as the object to be tested and which also contains
artificial reflectors whose echoes can be directly compared to the
discontinuity echoes from the test object. The application of the reference
block method is, in practise, made in two different ways:
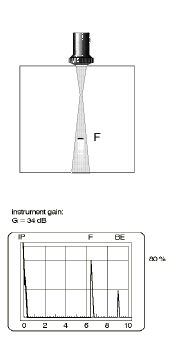
Comparison of
echo amplitudes
The test object
is tested with a high gain setting by which the smallest detectable reflector
is displayed. An echo indication is peaked, i.e. the maximum echo
indication is achieved by careful movement of the probe and the echo peak set
by adjustment of the gain to a predetermined height, e.g. 80% CRT screen
height (reference height) , Fig. 65.
|
|
|
|
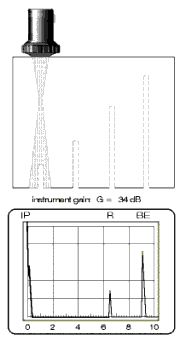
Using the same
settings, the reflector from the reference block is scanned which is
approximately positioned at the same distance as the discontinuity, Fig. 66.
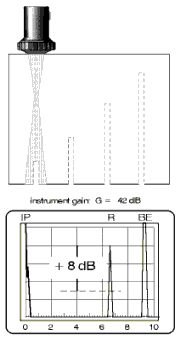
The quantative unit for evaluation is now
the gain change of the ultrasonic instrument which is necessary to set
the reference echo to the reference height, Fig. 67.
Result: The discontinuity echo is 8
dB higher than the reference echo because the gain must be increased by 8 dB
(from 34 dB to 42 dB).
The recording
limit normally corresponds to the echo height of the reference reflector whose
size is to be determined, the same as the DGS method, before the ultrasonic
test.
Distance
amplitude curve
All reflectors
in the reference block are scanned before the test, their maximum echo heights
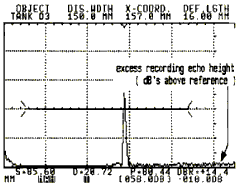
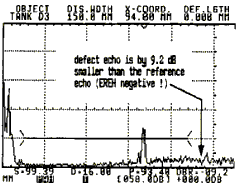
marked on the attachment scale of the display and joined by a curve, Fig. 68.
The curve
produced is called the Distance Amplitude Curve, or DAC for short.
When a discontinuity echo appears, an immediate assessment can be made whether
or not the discontinuity echo exceeds the DAC. In addition to this a
determination is made, by a corresponding gain change, to see by how many dBs
an echo exceeds the curve. This excess recording echo height (EREH)
is our reproducible measure for the evaluation and reporting of the
discontinuity.
The advantages
of the reference block method with a DAC are:
1. that it is no longer
necessary to compare each discontinuity echo with the corresponding reference
echo from the reference block but to directly make the evaluation with the DAC.
2. that the heavy reference
block need not be transported to the testing location.
3. that the recording of a
DAC for certain applications is only required once because the curve is
documented on a transparency or in the memory of a modern ultrasonic test
instrument.
By recording the
curve using reflectors in a test object comparable to the work piece, this
curve contains all the influences in the test object (distance law, sound
attenuation, surface losses). Corresponding
corrections are therefore not necessary. Regarding the evaluation results, we
must understand here that the effect of the discontinuity (geometry,
orientation and surface quality) is not taken a great deal into account the
same as the DGS method. Therefore, the result of a discontinuity evaluation
with the reference block method has the same uncertainty as the DGS method.
The preference
regarding which method to use is subjective. The corresponding national test
specifications normally state the test method to be used so that the operator
is not able to make his own decision. If no data is available, the test
situation should be analyzedin order to decide
which method be best used:
Firstly, it must
be established whether a reference block exists which corresponds to the test
object. If yes, then the test can be carried out simply and reproducibly with
the reference block method. If no reference block is available then the DGS
method can be used, or a reference block must be subsequently produced
comparable to the test object.
However, in many
cases the DGS method can be used without difficulty, namely when the test
object is made of low alloy steel, has a simple geometry, a low sound
attenuation and an even surface quality. The test should be carried out with a
narrow band standard probe with a frequency between 1 MHz and 6 MHz for which
there is a DGS diagram or a DGS scale.
The new computer
controlled instruments normally support the program controlled recording of
DACs. With the USD 10 the recorded DAC is automatically converted to a
horizontal line. This is known as time corrected gain (TCG) , Fig. 69.
The recording
curve is therefore an horizontal line so
that the evaluation can be visually and acoustically supported using a monitor
gate (flaw alarm), Fig. 70a-c. At the same time for each echo, the
excess recording echo height is displayed in dB (DBR value in the measurement
line of the USD 10) in addition to the data for discontinuity location.
|
|
|
|
|
|
|
Fig. 69 DAC of the
reference echoes (top) and with time corrected gain (bottom). |
Of course, the
recorded curves, including the complete instrument settings, can be stored. It
is therefore guaranteed that any later tests can be carried out with the same
settings. By storing the instrument settings, including the active A-Scans with
the discontinuity echo, the operator has all the data available for producing a
test report at any time.
Documentation
The higher the
value of a test object or the greater the importance of a component with regard
to the safety requirements of the complete object, e.g. an aircraft bolt, then
the more important the required ultrasonic documentation becomes (product
liability) . On the one hand this documentation proves that the test
was completely and correctly carried out, and on the other hand enables the
test to be repeated at any time under the same conditions (test reproducibilty).
The
documentation, the test report of an ultrasonic test, roughly
consists of 3 parts:
|
a. |
Data concerning the test object and the test method. |
|
b. |
Data concerning the testing device. |
|
c. |
Results of the test: |
Typical tabular
list of all detected and evaluated discontinuities, refer to the example
report, if necessary, a drawing of the test object with flaw positions. The
operator must record data during the test, especially data of the detected
discontinuity. Creation of the actual report is normally made later in the
office. The recordings must be frequently supplemented by calculations before
the operator transfers them into the report. The creation of a test report very
often takes as much time as the actual test itself and should be taken into
account when determining test expenditure. Even when working conscientiously,
transfer or calculation errors cannot be excluded, especially with large
amounts of data.
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Modern
ultrasonic instruments with memory and data transfer functions greatly improve
recording of the adjustment data and test results during the test as well as
creation of the test report and therefore ease the operator of a burden, who
can then concentrate on the test task. By directly storing of all discontinuity
data in the instrument, transfer errors can be excluded, position coordinates
of the detected discontinuities are entered into the instrument and are
therefore contained in the stored data set along with the A-Scan. If required,
the documentation can be printed at the test location, Fig. 71.
Individual
documentation matched to the test task is carried out with a PC. The
possibilities for measurement data processing are as versatile as the programs
offered on the market. In order to make the application of data communication
with a digital ultrasonic instrument flexible, a utility program is very often
used. This is normally a program which is easy to operate and enables reliable
data transfer between PC and test instrument.
In addition to
this, all stored instrument settings (= Data set) , the corresponding adjustment parameters (=
Function lists), the display contents (= A-Scans) as well
as the individual parameters can be recalled and stored on a floppy disk or
hard disk. Function lists are filed into an ASCII format, A-Scans and LCD menus
in normal graphic formats (PCX, IMG). A data set corresponds to a complete
instrument adjustment and is saved in a hexadecimal format. This guarantees
that by return transfer of the data set to the test instrument exactly the same
instrument settings are available. The function lists and graphics are now
available to the operator for further use.
Now he is able
to use his own program (word processing, database) for individual design of his
own test documentation. Instrument settings and display graphics are simply
read into his program. This routine work is easily made by a so called Macro.
A macro is nothing more than a list of commands belonging to the user program
being used and runs automatically thus creating the required documentation. The
names of the files to be processed are requested, in dialog, by the operator.
The following
report is an example of documentation automatically produced for a weld test. The
test was made with the USK 7 D and the indications from the discontinuities
stored in the instrument. Finally, all data (function lists and A-Scans) were
stored on a disk using the program UltraDoc.
The test report was made with a macro from the program WordPerfect 5.1:
Ultrasonic
test report
(example referring to AD-Merkblatt HP
5/3)
|
Manufacturer |
SLV-Duisburg |
Weld test |
Specimen No. 1 |
|
Weld type: |
V |
Weld preparation: |
30° |
|
Welding method: |
Covered electrode |
Parent material: |
ST 52 |
|
Added material: |
unknown |
Test volume: |
Weld + HAZ |
|
Test surface: |
1,2 (see drawing) |
Test surface condition: |
evenly rough |
|
Weld thickness: |
25 mm |
Weld width |
32 mm |
|
Weld length |
200 mm |
Reference points: |
see drawing |
|
Misc.: |
Evaluation with DGS scale |
|
|
|
Test instrument: |
USK 7 D |
Calibration range: |
200 mm |
|
Sensitivity setting: Probe: |
ERS 3 + 6 dB MWB 70 4E |
Corrections: Frequency: |
+ 14 dB transfer loss 4 MHz |
|
Angle of incidence: |
70° |
Scanning position: |
see drawing |
|
Standard Calibration block: |
V2 |
Reference block: |
R25/C |
|
Couplant: |
ZG 5 |
Pre-test: |
nothing found |
|
Test class: |
b |
Recording threshold: |
ERS 3 |
Indications to
be recorded:
|
No. |
Sec. |
l1 |
lmax |
l2 |
t |
dt |
d |
Dir |
dB |
Findings / remarks |
|
1 |
1 |
0 |
20 |
30 |
0 |
4 |
21 |
2 |
+ 18 |
Root crack |
|
2 |
1 |
0 |
30 |
32 |
- 1 |
3 |
23 |
1 |
+ 6 |
Root crack |
|
3 |
1 |
166 |
191 |
201 |
0 |
2 |
21 |
2 |
+ 6 |
Root crack |
|
4 |
1 |
163 |
168 |
201 |
- 1 |
2 |
22 |
1 |
+ 2 |
Root crack |
|
5 |
1 |
- |
126 |
- |
2 |
- |
19 |
1 |
- 8 |
Pore/small inclusion near edge |
|
6 |
1 |
- |
50 |
- |
0 |
- |
22 |
6 |
- 6 |
Transverse crack |
|
Test location: |
Cologne |
Date: |
12.3.1991 |
|
|
|
Test result: |
Repair necessary |
|
Operator: |
J. Smith |
Supervisor: |
H. Müller |
|
Signature: |
|
|
|
Diagnosis of
indications (outlook)
As opposed to
the tasks of an ultrasonic operator, dealt with up until now, the diagnosis of
indications is not only based on measured ascertainable parameters. The
interpretation of the echo is an additional task. This interpretation normally
requires many years of practical experience including carrying out comparsion tests of ultrasonic findings with the
results of a destructive test on a test object which is no longer to be used.
Methods for diagnosis of indications as well as signal analysis techniques
using auxiliary equipment are outside the bounds of this introduction to
ultrasonic testing. For this, there is a range of literature available as well
as many special publications which we would like to point out to the reader.