PID Controller With Detailed P,PI,PD & PD Control
PID is acronym for Proportional Plus Integral Plus Derivative Controller.It is a control loop feedback mechanism (controller) widely used in industrial control systems due to their robust performance in a wide range of operating conditions & simplicity.In This PID Controller Introduction, I have Tried To Illustrate The PID Controller With SIMPLE Explanations & BASIC MATLAB CODE To Give You Idea About P,PI,PD & PID Controllers
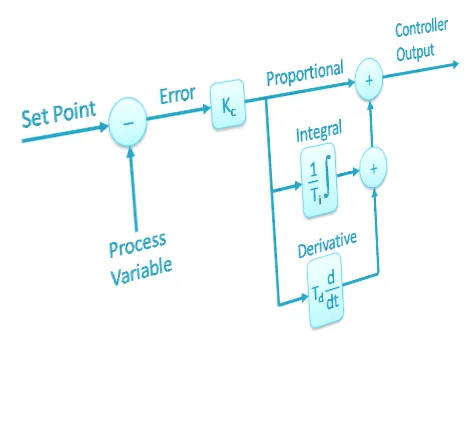
For PID control, the actuating signal u(t),consists of proportional error signal added with derivative and integral of error signal e(t)

The Plant P is controlled by input u(t) which is represented as

Where Kp is the Proportional Gain,Kd is the Derivative Gain & Ki is the Integral Gain of the controller
Frequency Domain Representation of PID Controller
In Frequency Domain (after taking Laplace Transform of both sides),the control input can be represented as
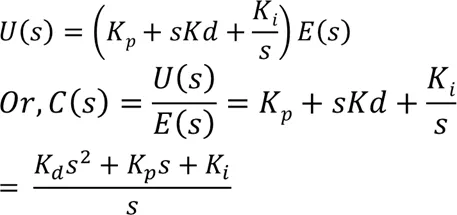
Thus ,PID controller adds pole at the origin and two zeroes to the Open loop transfer function
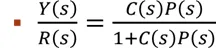
The Closed loop Transfer Function of the system can be written as