FOUR BAR MECHANISM ANALYSIS BY RELATIVE VELOCITY METHOD
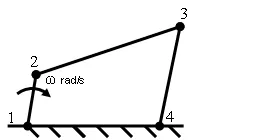
Four bar mechanism is given below in the diagram having angular velocity ω rad/s in the clockwise direction
Fig. 3.2 four bar mechanism
Velocity of the point 3 relative to 1= velocity of point 3 relative to velocity of point 2+ velocity of point 2 relative to velocity of point 1.
\[{{\text{V}}_{{\text{31}}}} = {{\text{V}}_{{\text{32}}}} + {{\text{V}}_{{\text{21}}}}\]
The velocity of point 3 relative to 1 will be equal to velocity of point 3 relative to 4 as point 1 & point 4 both are fixed point, so we can write
\[{{\text{V}}_{{\text{34}}}} = {{\text{V}}_{{\text{32}}}}{\text{ + }}{{\text{V}}_{{\text{21}}}}\]
Here
\[{{\text{V}}_{{\text{21}}}} = \omega\times {\text{12}}\], which is perpendicular to 12
Similarly,
V32 is unknown in magnitude but it will be perpendicular to link 23
V34 is unknown in magnitude but it will be perpendicular to link 43

Fig. 3.3
Angular velocity of links
a. Velocity of 3 relative to 2, V32 link 3 moves in anti-clockwise about 2.
\[{{\text{V}}_{{\text{32}}}}{\text{ = }}{\omega _{{\text{32}}}} \times {\text{23}}\]
\[{\omega _{{\text{32}}}} = {\text{ }}\frac{{{{\text{V}}_{{\text{32}}}}}}{{{\text{23}}}}\]
b. Velocity of link 34
Angular velocity of link 3 relative to 4 is in clockwise direction & is given by
\[{\omega _{{\text{34}}}}{\text{ = }}\frac{{{{\text{V}}_{{\text{34}}}}}}{{{\text{43}}}}\]