Determining the wheel dimension is a critical part of design of a robotic vehicle. This blog attempts to establish a correlation between the maximum attainable speed and wheel size of a typical robotic vehicle design.
The calculations given further down are based on the assumption that there is sufficient torque to overcome the frictional forces that impede motion. The maximum speed at which a robot can move is a function of force applied by the wheel horizontally along the floor. The force applied by the wheel is a function of wheel size and the torque at the wheel axle, which in turn depends on the gear mechanism and the amount of torque that the motor can produce. For ease of calculation, let us assume that the wheel has attained 'full speed' which is the motor speed 300 RPM.
We know that the circumference of the wheel is given by C=Pd. As the wheel rotates along the floor, every point on the circumference of the wheel contacts a corresponding point on the floor. Imagine that you mark the point on a wheel that is in contact with the floor, also marking the floor at that point, then roll the wheel in a straight line until the original point is in contact with the floor again, and mark the floor again at that point. It is easy to see that the distance between the two marks on the floor will be equal to the circumference of the wheel. Therefore we have an easy way to determine the distance that the robot travels for each rotation of its wheel.
If we multiply the distance the robot travels during each rotation times the number of rotations per minute, we will know the distance travelled per minute. Therefore, the speed that the robot travels is the product of the circumference of its drive wheels (the wheels that are applying power to the floor) times the rotational speed of the wheels.in other words,
V = C XN
Where,
V= Liner velocity (speed)
N= Rotational speed of the wheels
C = circumference of the wheel
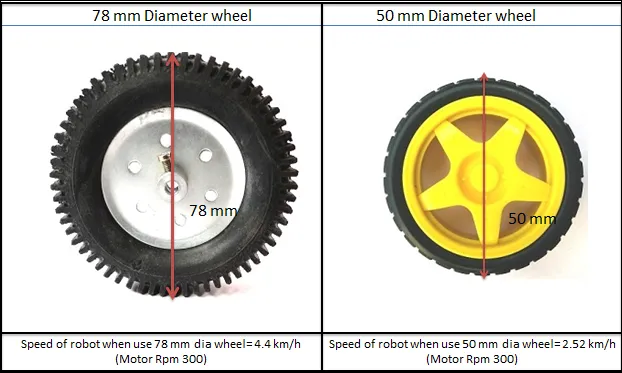
For example, if a robot’s drive wheel is 7.8 centimetres (0.078 m) in diameters and its rotating at 300 rpm (300rev/min)
So, the circumference of the wheel is,
C =π X d
C= 0.24492 m
Now, the robot will travel along the floor at the speed of, V = C X N
Or, V= 0.24492 X 300
V= 1.2246 m/s
Now in the form of km/h robot will travel along the floor in 4.4 km/h.
From the above equation we can easily determine how the wheel size affects the speed at which the robot travels.