Generalized Mechanism Analysis Computer Programs
It can probably be seen how the methods taken for the solution of each new problem are quite similar from one problem to the next. However, particularly in three-dimensional analysis, we also see that the number and complexity of the calculations can make solution by hand a very tedious task. These characteristics suggest that a general computer program might have a broad range of applications and that the development costs for such a program might be justified through repeated usage and increased accuracy, relief of human drudgery, and elimination of human errors. General computer programs for the simulation of rigid-body kinematic and dynamic systems have been under development for some years now, and some are available and are being used in industrial settings, particularly in the automotive and aircraft industries.
The first widely available program for mechanism analysis was named KAM (Kinematic Analysis Method) and was written and distributed by IBM. It included capabilities for position, velocity, acceleration, and force analysis of both planar and spatial mechanisms and was developed around the Chace vector-tetrahedron equation solutions. Released in 1964, this program was the first to recognize the need for a general program for mechanical systems exhibiting large geometric movements. Being first, however, it had limitations and has been superseded by more powerful programs, including those described next.
Powerful generalized programs have also been developed using finite element and finite difference methods; NASTRAN and ANSYS are two examples. In the realm of mechanical systems these programs have been developed primarily for stress analysis and have excellent capabilities for static- and dynamic-force analysis. These also allow the links of the simulated system to deflect under load and are capable of solving statically indeterminate force problems. They are very powerful programs with wide application in industry. Although they are sometimes used for mechanism analysis, they are limited by their inability to simulate the large geometric changes typical of kinematic systems.
The most widely used generalized programs for kinematic and dynamic simulation of three-dimensional rigid-body mechanical systems are ADAMS, DADS, and IMP. The ADAMS® program, standing for Automatic Dynamic Analysis of Mechanical Systems, grew from the research efforts of Chace, Orlandea, and others at the University of Michigan II and is available from Mechanical Dynamics, Inc. (MDI). 12 DADS, standing for Dynamic Analysis and Design System, was developed by Haug and others at the University of Iowa 13and CAD Systems, Inc. (CADSI).14 The Integrated Mechanisms Program (IMP) was developed by Uicker, Sheth, and others at the University of WisconsinMadison.15 These and other similar programs are all applicable to single- or multiple degree-of-freedom systems in both open- and closed-loop configurations. All will operate on mainframe computers or on workstations, and some will operate on microprocessors; all can display results with graphic animation. All are capable of solving position, velocity, acceleration, static force, and dynamic force analyses. All can formulate the dynamic equations of motion and predict the system response to a given set of initial conditions with prescribed motions or forces that may be functions of time. Some of these programs include collision detection, the ability to simulate impact, elasticity, or control system effects. Other commercial software in this area include the Pro/MECHANICA ®16Motion Simulation Package and MSC Working Model®17 systems.
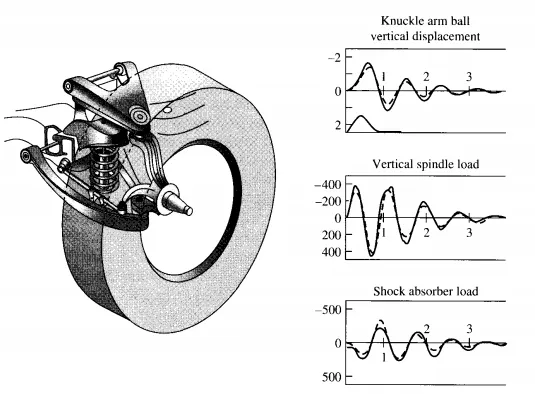
Figure 12.14 Example of a half-front automotive suspension simulated by both the ADAMS and IMP programs. The graphs show the comparison of experimental test data and numerical simulation results as the suspension encounters a I-in hole. The units on the graphs are inches and pounds on the vertical axes and time in seconds on the horizontal axes. (JML Research, Inc., Madison, WI, and Mechanical Dynamics, Inc., Ann Arbor, MI.)
Figure 12.15 This pipe-clamp mechanism
A typical application for any of these programs is the simulation of the automotive front suspension shown in Fig. 12.14.* Simulations of this type have been performed with several of these programs and they have been shown to compare well with experimental data.
Another type of generalized program available today is intended for kinematic synthesis. The earliest of such programs was KINSYN (KINematic SYNthesis) and this was followed by LINCAGES (Linkage INteractive Computer Analysis and Graphically Enhanced Synthesis) 18 and others. These systems are directed toward the kinematic synthesis of planar linkages using methods analogous to those presented in Chapter 1I. Users may input their motion requirements through a graphical user interface (GUI); the computer accepts the sketch and provides the required design information on the display screen. An example showing the use of KINSYN is shown in Fig. 12.I5. A much more recent system of this type is the WATT Mechanism Design Tool from Heron Technologies, 19 a spinoff company from Twente University in Holland