Robots for Humanitarian Demining
The landmines are weapons developed to be deployed near or under the ground to explode when it is contacted by a person or a vehicle. Basically landmines can be dived in to two: AP anti-personnel and AT anti-tank landmines, depending on their target and the cost. Both were used by the military personals to protect their zones from their enemies. Because of their low cost and the easiness of the deployment, landmines will be spread in the land. This will stop any further use of these valuable lands for civil purposes.
On these humanitarian grounds, the Ottawa Convention prohibits their use, manufacture, trade and stockpile, and requests their destruction. This convention is promoted by the United Nation and ratified by several nations. Still few countries are not the members of this convention as they are involving war between different communities in their countries. Therefore, landmine is a typical problem for the developing and under developed countries.
Demining can be classified in two, depending on the problem definition.
● The military minesweeping: to achieve fast clearing with acceptable reliability to open a safe passage for military personals to enter their battlefield;
● Humanitarian demining: to achieve 100% clearance of the ground at acceptable cost.
The present humanitarian demining process does not addressed the actual ground situations and not giving a viable and acceptable answer [4]. Lot of research and efforts have already been undertaken but cannot see a viable answer when considering the ground situations. The idea is to find a long lasting and an acceptable solution by a bottom-up approach with the local technological know-how. This will help expanding the local people consciousness to become the master of their own ongoing upgrading, by qualifying commonly used devices and techniques and turning them towards humanitarian demining duties.
In the current context only manual mine clearing is used by deminers as an acceptable methodology while armed forces are using high cost mechanical mine clearing. The ‘robotic solution’ becomes a highly engineering job which is depending on imported devices where the know-how is not available. The increasing cost of the sophisticated devices incorporated in to the robotic devices making very high initial investment and low return on investments. Therefore understanding the actual background is required before trying to solve forcefully as a technology driven issue.
For such purpose, the present investigation tries to acknowledge the main conditioning peculiarities through solution appropriateness to local context. In this context, the following conditions should be recognised:
● Local socio-political implications should be removed or neutralised before applying the technical solution.
● The humanitarian demining outfits should assure the fit-for-use land operation with the community involvement at the standard decentralised level.
The two aspects suggest series of assumptions where necessary to study in the present context. First, no abstract developments are considered; on the contrary, proper investigated measures are dealt with, deeply rooted on the local historical frames. Second, the factual evidence of behaviours is deferred to results, and these are consequence of achieved benefits. Third, the routine job shall achieve the final objectives with minimum damage, and finally, the techniques and workflow should organise with well-understood know-how.
Although there are millions of people living in landmines affected countries, the size of the landmine problem is not yet well defined. Quantifying the landmine size is a difficult task as no reliable information or indicators. After the Second World War, the developed countries within Europe also affected by landmines. But recently, landmines are the major issue for developing countries where ethnic conflicts have taken place. Landmines have been used from centuries to protect valuable lands. Their present use, because of the low cost made them suitable for putting everywhere without any restrictions during civil conflicts, typically in developing countries.
The landmines stay in the ground even after the end of the conflict in active state until the land is cleared. This will obstruct the free movement within the affected areas whether the area is agricultural or not. As the landmines are remaining for years on the land, the important resources linked to these areas cannot be used. Therefore, landmine removing with 100% clearance is a necessary duty.
Therefore, landmines influence the development indices in both economic as well human. The mine-affected countries’ economies are badly affected by loss of land, loss of human lives, loss of production, etc. Lot of indirect factors such as social services, education services, health services and transporting goods are also affected. The human development is also heavily affected by landmines because of direct factors as well indirect factors. Human freedom index (HFI) is heavily affected by the inability of the freedom of the movement. Therefore reducing the impact on landmines is very important in developing countries.
Landmine issue should not be considered as an isolated problem as the developing countries are facing some other problems in the same scale such as tsunami, dengue, accidents, etc. The demining is very extreme very slow process with the existing methodologies and strategies.
Today, there are several industry level marketed products which replacing the men from the mine filed. And also there are robots with intelligence and self-organising facilities but they are not well fitted to the actual filed. However, the strength of the industrial revolution is depending on the entire workforce with pre-established jobs allocation according to the relevant knowledge. Only in such a situation, the technologies reach the real suitability, and lead to higher incomes for the populations involved. The analysis is not continued, keeping mainly the following points:
1. The selected technologies must provide special equipment, with a task oriented to the duties and a uniformity adapted by the operators;
2. The pre-establishment of the workflow should detail the work cycles and the standard achievements, and specify the rules of protection of failures in course;
3. The instruction and training of operators aims to optimise workflows outside the process, especially to avoid the emergence of risky commitments;
4. Efficiency comes from organised routine work, fulfilled by the diligent activity of the workforce, in accordance with assigned tasks;
5. The local public administration is entitled to the authority to promote the mine clearance service, and the community involved is very concerned.
Basically, the description assumes the commitment of neighbouring political societies, deal with terrorist damage, react automatically as soon as the incursions are made, and immediately put into action the recovery processes, resorting to the forecasting equipment and the pre-established schedules. The legal framework does not require any updating, unless the usual elements of solidarity. Technical support should be developed in accordance with the ideas of the (original) industrial organisation, focusing primarily on the effectiveness of job placement procedures, in parallel with the diligence of hired labour.
The chapter is organised as follows. The present chapter provides the introduction with covering the problem definition, the technical and other challengers that need to be faced by the demining demands. Section 2 basically specifies the literature review, including the current demining issues, the role of the robots in humanitarian demining, the existing demining technologies and agricultural technologies for demining, safety issues and lessons and suggestions. Section 3 deals with the proposed sustainable solution which includes the functional design, architectural design and operational techniques. Final section discusses the conclusion with the suggestions for future research directions.
Literature review
This section basically specifies the literature review, including the current demining issues, the role of the robots in humanitarian demining, the existing demining technologies and agricultural technologies for demining, safety issues. And finally, some lessons and suggestions for future improvements are added.
LANDMINE CLASSIFICATION
The removal and the destruction of mines safely from the sites are very important for any country to recover from the threats. However, this tedious task involves money, time and risk. Anti-personnel (AP) mines are harmful because of their unknown characteristics such as small in size, different explosive loads and different triggering. Landmines can be activated by:
● Pressure
● Tripwires
● Remotely
Some of the landmines used in battlefield [6] are listed in Figure 1.

FIGURE 1.
Types of landmines used in battlefield.
Mines may have been in place for many years in the battlefield. With the time, they may be corroded, mixed with water, mud or dust and they may activate in unpredictable ways. Some mines were moved into a new location and buried deep in the soil by making the demining process more tedious work. Deeper mines may not activate but may later detonate when the ground is soft. Modern landmines are made from non-metals with advanced technologies which prevent detecting using metal detectors.
LANDMINES CLEARANCE BASIC PROCESSES
The basic process of landmine clearance consists with different tasks [7, 8]. Basically they are
● Map the mine field by data collections
● Prepare the identified land for clearance
● Identified the individual mines within the marked area by a mine detection equipment
● Clear the detected mines by removing and destroying
A clearance is a process that needs a proper methodology which considers technological sustainability, economical sustainability and social sustainability as well as weather and ground conditions. It is necessary to associate this process with social awareness to reduce the unarmed civilian causalities. Locating the mined land will help to separate the danger from people and to make the land for the usage of the civilians.
ECONOMICAL ASPECTS OF DEMINING
The economic aspect is more important since most of the affected countries are Third World countries. Most demining countries are receiving funding from international organisations for their demining operations. By helping to secure funding longer, tackling the problem of landmines as a development problem would also help to see the problem under a different perception, allowing for a faster and more efficient approach. As the fear of mines affecting local communities and not the actual presence of mines is evident, areas considered to be mined pose a certain level of risk. Therefore, the 100% mine clearance requirement could be changed to a lower degree of safety.
Since demining has a major influence on development, technology for humanitarian demining also plays an important role in development. The importance of the role of technology in development is widely recognised. Science and technology play a fundamental role in the development process, as demonstrated by the industrial revolution. After 1820, one-sixth of the world’s population reached a high level of income through consistent economic growth and technology has played a vital role.
In fact, one of the main differences between rich and poor countries is their tendency to innovate new product or services. Inventors or researchers in poor countries do not invent new product because they know that they will not be able to recover those large fixed costs of developing new products. Other technologies developed in other countries can help them to introduce new ideas or tools to make it best fit for their ecological reasons. Therefore, investing in technological capabilities is believed to be one of the key actions that rich countries can take to end poverty in developing countries. In fact, the increase in investments in technological capacity and not only increase the amount of financial capital per person, but also the quality of the technology incorporated in the transfer and the corresponding degree of adequacy.
Rapid economic development requires high technical capacity for entire society. However, that technology should be suitable to the local context. Home grown technology is needed in every sector in developing countries with the help from developed countries for adapting the local needs in areas ranging from energy production and use, construction, natural hazard mitigation, disease control and agricultural production as well as demining.
Despite peace, the remnants of the protracted civil wars in the third world continue to disrupt people’s lives, posing a physical as well as a psychological threat to those internally displaced persons (IDPs) that have returned, and contributes to the continued displacement of those that remain displaced. Landmines and unexploded ordnance (UXO) lie amidst a multitude of complex and interlinking problems. When IDPs return, they not only find their land mined, but their homes, businesses and commercial centres destroyed; their agricultural tools, fishing equipment and boats, livestock and possessions lost or stolen, and a political and social welfare system struggling with the consequences combined with a dependency on outside assistance, which was high even before the conflict began.
Demining is a process which is consuming huge money. It is estimated that the current demining rate is slower than the laying rate. It seems an endless war with endless demining. Therefore, to take an effort to stop further use of landmines is very important task. Otherwise, the ongoing humanitarian demining activities result mostly ceaseless, with no practical falls-off, unless the minesweeping could become a cheap, safe and fast operation, so that the mining would be reduced to almost useless deterrent.
REFERENCE DEMINING TECHNOLOGIES
Manual demining is a procedure in which mines are manually detected by any kind of detection method and neutralised by human deminers. Manual demining is not safe but it is effective than other methods with low cost. Rake method is the one of the lowest procedure that can be used for demining. There are three types of rakes used in the demining field, heavy rake (Harrow), metal light rake (Brush), and plastic light rake (Brush). Categorisation words such as heavy and light would not describe their function and describe only the weight of the equipment. The heavy rake is used where the ground is tough and the light rake is used in loose soil.
Safety and performance is based on the design of the rakes. Rake has a long handle to keep the deminer at a safe distance during an accident. This work is a repetitive task and it requires a considerable effort. The two-pronged rake has a good performance by loosening the rigid soil and raising the mines out of the ground. The brush rake is used to move the floor towards the deminer. There have been no accidental initiations while using the brush rake, which is believed to be inherently ‘safer’.This is a cost-effective method comparing other existing methods. Still it is dangerous for the deminer as he is not in a good safe area.
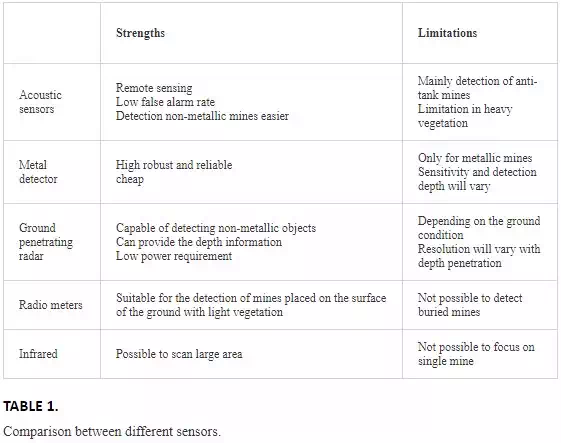
There are many technologies tested for demining. The well-known techniques, their principle of operation and the current state of usage are described in the following texts. In this section, the short survey describes the sensing technologies that will help full to humanitarian demining in the present as well as in the future. Basically, sensing technologies can be divided into two categories as shown in the Figure 2. Some of them are briefly descried in latter sections.
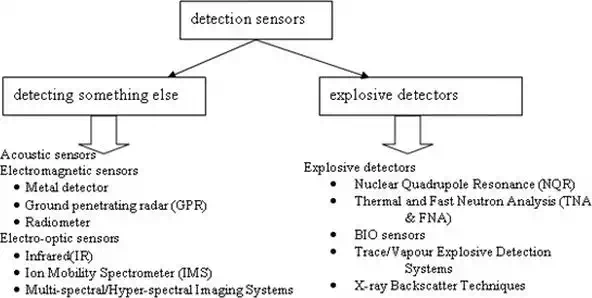
FIGURE 2.
Detection sensor technologies.
Sensitivity of the mine detection animal is much higher than the man-made detector. Specially trained rats, dogs could be used to detect the explosive. Most of these animals can work all most all types of terrain with few constrains such as time limitation. Because most of these animals cannot work for long time efficiently as they may fed-up with their work after few hours of work. Effectiveness of mine detection by animals depends on their training and the environment they are working. Anyway, this can be a costly option for most of the affected countries.
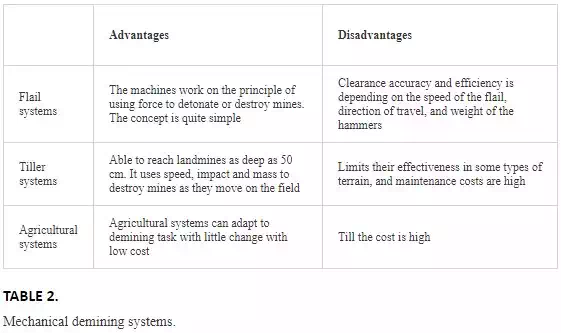
Mechanical approaches rely on the use of motorised approach. Basically those machines are not specifically designed for the said task. Some of them have been adapted from military vehicles or from agricultural vehicles. The mechanical approach is fast and well suited for making a cleared passage, but still cannot achieve the precision of humanitarian demining and safety standards. And also this method is not an environmentally friendly solution. Mechanical methods have emerged with their own strengths and weaknesses. Mechanical machines do not destroy all mines in a contaminated area but it can be pushed the anti-personnel mines away from the passage. This will make them more dangerous as the mines can be buried more deeply or partially damaged. There are different techniques used by demining agencies to clear the mine field such as flail systems, tiller systems, combined systems and agricultural systems (Table 2).
All above techniques do not solve the world demining problem. They fulfil only one part of the problem. They cannot work alone in the field. They must do the work after some clearance or after they cleaned some other instrument should follow to check the field.
ROBOTS AND HUMANITARIAN DEMINING
Demining community would like to use teleoperated robots or fully automated robots for their work as it will enhance the safety. Applying the technology should be done with a balance between the cost and the efficiency. Therefore, a complete cost analysis should be done for the optimisation without sacrificing the efficiency and the safety. Properly sized robotic solutions with suitable mechanical structures are well suited for developing countries with targeting high safety and productivity. Robotic technology with sensors, semi or autonomous navigation and machine intelligence are the present challengers which are faced by the demining industry. Furthermore, the use of many robots such as swarms and coordinating them, using Multi Agent Systems (MAS) will improve the productivity. Anyway, the guarantee will not be there for those robots when they are working in the hazardous area. Therefore, correct evaluation and analysis should be done in order to find the best-fit solution for the local community.
Still robots are well for clean environments. However, demining area is not flat and it consist lot of obstacles. The normal robots cannot move freely in this kind of environments. Clearly, it is a challenging task to design a universal solution that is applicable for different field with lot of other constraints. And also these highly technical robots or machines need very well trained people which may difficult to find in most of the war-affected countries.
Due to the complexity of this clearance process, the international community should work together with the affected country in order to find a sustainable solution with enhanced effectiveness, high reliability and safety.
SAFETY ISSUES
The demining work mainly depends on manual removal by humans. It gives serious safety issues, as human operator is not out of the dangerous area. For increasing safety mechanical demining machines with remote control ability and autonomous robots with autonomous detection capability have introduced. In these cases, the human operator is safe but not the machine. It is very important to consider the safety of the human operator and the machine itself. And also remote control robots faced some safety issues with control because they are going to work with variety of environmental conditions. Therefore, it is better to propose a system which can remove mines safely without prior detection phase. Robot aided minesweeping (RAMS) is going address this task.
LESSONS AND SUGGESTIONS
The state-of-the-art survey provides the background information on humanitarian demining with the assumptions of our investigation. It could render terrorist operations ineffective and within a very short period of time but it is a very difficult task. According to the literature review, it is found that today no clearing process guarantees the required effectiveness, in terms of cost-to-result performance. The elaborated techniques each have their own merits and could be retained in specific situations:
● the mechanical demining is a useful technique for military mine clearing to establish a safe route for their troops;
● the manual clearing using rake techniques with or without detecting devices is the only left option when the field is vegetated with irregular ground.
However, the problem here is to clear agricultural land right after the terrorism is over for the farming activities. The efficiency is highest important thing with safety and reliability. Engineering solution for this problem should assure the safety with low cost. Therefore, front mechanism for neutralising the mines should be managed by remote control with assuring the highest adaptivity and flexibility due the direct human overseeing. The main constraints, for the development successfulness, distinguish a series of accomplishments.
However, the basic problem here is to clean up the agricultural land after eliminating terrorist activities from the field. Highest efficiency is a fundamental requirement for an engineering solution with acceptable safety and reliability. Fully autonomous robots with high cost could replace by introducing remote control with greater adaptability and flexibility with human supervision. The successfulness may depend on
● the infrastructure which should be managed effectively with the local society for promoting and steering the initiatives.
● the proper way of workflow setting to achieve a higher productivity in the mine clearing with pre-defined targets;
● the design and development of the demining outfits which is directly derived from local know-how;
● the assessment and establishment of the task schedule in strategic, tactical and execution levels for the bottom-up clearing approach.
This work is addressing the engineering issues, examines the third achievement, with due concern from the second (analysing workflow diagrams, focusing on in-service alarm/recovery patterns) and the fourth (using results from the simulation, with an explanatory purpose in the accumulation of knowledge of the process).
According to the above outlined implementation constraints, the development of the consistent task-oriented outfits would be the principal objective of the present day investigations. The qualifying requirements to be
● the cost containment of the basic equipment and maintenance charges;
● the shared knowledge of the technologies involved and full confidence in their use.
The favourite choice lies within the agricultural machines which are widely available and purposely can be changed their structure for the use of demining. The local market makes extensive reference to simple and chip equipment, for multi-task machines, so that there is a great possibility of finding basic devices which can be transformed easily into mine clearance equipment by adding special-purpose kits. The choice goes, perhaps, without saying, once recognized the restrictive inferences that cannot be left aside. However, real development requires a series of actions such as the following:
● To characterise the selected agricultural machine with duty-driven fixtures to achieve the required demining capabilities;
● To design and implement the selected manipulators, preserving the machine technological consistency, with shared know-how for keeping the maintainability;
● To define and schedule the programme flow charts in order to improve the productivity in strategic, tactical and execution levels with specified targets, thresholds and timings;
● To appraise and check the performance in all areas such as safety, effectiveness, and reliability with considering the unexpected failures.
The whole process is a standard engineering activity which is to be fulfilled by providing the details of the explanatory developments covering
● strategic horizon: duty-steered functioning to prove the suitableness and appropriateness of the selected technology;
● tactical horizon: occurrence-driven performance to help selecting optimal procedure to achieve the continues running with highest productivity;
● execution horizon: anomaly-coerced evolution with on-process decision patterns to show the adaptivity and flexibility of the operation.
In fact, old industrial productivity remains at the level of out-of-process configuration (scientific paradigms of job assignment), and this would prove to be totally flawed outside manufacturing facilities with the flow-store organisation. The current flexible productivity of automation comes from the real-time management of standard tactical plans and unforeseen anomalies (intelligent task-oriented paradigms), and this can be governed by fully autonomous government blocks factories) or schemas in mixed mode (with in-line and/or remote control operators to direct the front effectors). The all leads to the job-shop organisation, and can readily be extended to the loosely structured environments, basically, referred to as robotic implementations.
The general principles are the well-known methodologies in the modern engineering with the above requirements. This helps the present investigation to be more challenging with motivated objectives.
Special-purpose mine clearance equipment and procedures are intended to be explanatory opportunities and equivalent equipment/programming may be devised with slightly different design parameters. This means that sets of comparable implementations are easily obtained by using a sketched design and development approach. Mainly the research only addresses the main demands of feasibility and adequacy. In addition, the complexity of the domains, as is clear from the state of the art described in the chapter, shows that humanitarian demining is open to many possible approaches; Lean viability and technological suitability are relevant constraints, offering valuable novelty, at least from the methodological point of view.
Agricultural technology for demining
The study on the landmine issue in developing countries allows identifying a number of aspects that should be considered as characterisation lines. In the current context humanitarian demining is financed and directed by International Organisations in most of the war-affected developing countries. This should deal with the ongoing terrorist activities to get a guarantee on no future deployments of mines in the area would occur in the area. Otherwise, demining activities become a ceaseless operation.
The idea behind the prospected approach is to change the landmine spreading into a basically useless intervention, so that, out of the existing socio-political implications in war-affected countries, no real advantage could be win by terrorist actions; on the contrary, the economical falls-off would be neutral, without serious outcomes into internally displaced people (IDPs), to lower the expected indirect benefits, while leaving open the responsibility hatefulness.
The idea behind the prospective approach is to transform laying landmine into a basically useless activity. Then no real advantage could be gained by the terrorist by laying landmines. And also economic falls-off would be neutral and no serious problem occurred to internally displaced persons (IDPs).
On the outlined objectives, the engineering approach to the mine-clearing business reduces to devising the instrumental process and work organisation to be enabled as routine counter-measure, each time it happens crucial. The operators are enrolled on place. The technologies exploit local know-how, with resort to standard agricultural equipment. The effectiveness assures properly high achievements. The process safety and reliability are consistent with the required duties. Should these figures be reached, the IDPs effects disappear, and the landmine terrorist spreading ceases to be winning operation, during the tactical occupation of enemy lands, as the routine counter-measure avoids any injuring upshots?
The challenge proposed by the outlined objective is worth the present investigation. In fact, as above recalled, the industrial revolution has science and technology as pivotal aids, but work organisation as critical enabler. The every word ‘industry’ has the original meaning ‘diligence, assiduous activity at any work’, only later modified into: ‘the aggregate of manufacturing production enterprises in a field of business activity, for example, the automotive industry’ or ‘structured organisation, or systematic work or labour’. This leads to acknowledge in the ‘trend to industrial innovation’, the role of the ideas behind technologies, say, chiefly, the ability to pre-arranged assiduous labour (or, scientific work organisation) that assures the economic growth, with return on investment because of the diligence of the front-end operators (not on the mastery of individual craftsman or scientist).
Today, of course, we recognise several ‘industry’ levels, replacing the men, with robots, managed by intelligent work organisation of self-governing facilities, each time the business awards yield from the (large) fixed assets. Nonetheless, the might of the industrial revolution lies in the aptitude of ruling the workforce totality, by pre-assigned job allocation, once the surrounding outfits are properly chosen, and the pertinent know-how is duly widespread and accepted. Only in such situation, the technologies reach actual appropriateness, and lead to higher income for the involved populations. The following key points have identified as the main objectives when designing any demining machine.
● The engaged technologies shall provide special purpose outfits, having duty-driven consistency and operators adapted uniformity;
● The workflow pre-setting ought to detail the workcycles and standard achievements, and to specify the ongoing failure protection rules;
● The operators’ instruction and training aim at off-process optimised workflows, especially, to avoid the emergency of risky engagements;
● The effectiveness comes from organised routine jobs, fulfilled by the workforce diligent activity, in conformity to the allotted tasks;
● The local Civil Service is entitled of the authority to promote the mine-clearing duty, and the involved community is solidly concerned.
Basically, the description assumes the commitment of the neighbouring political societies, to face the terrorist damages, automatically reacting as soon as the raids are undertaken, and immediately putting in action the recovery processes, with resort to the forecast outfits and the pre-arranged schedules. The legal frame does not require any updating, unless the usual elements of the solidarity. The technical support needs to develop according to the ideas of the (original) industrial organisation, with primary focus on the effectiveness of the job-allocation procedures, taken in parallel with the diligence of the engaged workforce.
The proposed approach is consistent with the short-term issues. The counter-measures worthiness is given by the mine-clearing effectiveness, and the present investigation tries to devise how the goal can be achieved according to factual developments. Should the short-term issues be reached, also the long-term ones reconsidered under different light, leading, perhaps, to worthy settlements, with nice economical falls-off, up to the rehabilitation and development of the war-affected countries? Summing up, the approach aims at taking profit from the below statements:
● The resort to Civil Services, managed by the local communities, assures awareness of the remediation duties and consciousness of solidly organised association;
● The effectiveness of standard workflow clearing factually neutralises terrorist landmine scattering, as soon as the socio-economical falls-off mostly evaporate;
● The off-process job allocation and special-purpose outfits development make easy to achieve proper industrial-like productivity, for the community return;
● The processing set-ups can be devised with full technological appropriateness and shared know-how consistency, directly involving pooled competencies.
The advantages/drawbacks balance of the prospected approach depends on how far these statements are met. The present investigation aimed at assessing the feasibility of the last one, which come up to straight engineering commitment and, moreover, needs to be solved as preliminary step, before to address any other statements.
The robot-aided minesweeping (RAMS) project, actually, developed at different ranges, privileges:
● cheapness, to interpret robotics as intelligent work organisation opportunity;
● co-cooperativeness, to involve in situ operators, fully trusting their commitment;
● feasibleness, to make resort to locally widespread know-how and apparatuses;
● methodologies, to develop effective minesweeping, with local appropriateness;
● technologies, to assure safe and reliable economic consistency and effectiveness.
The ‘robot’ solution is needed on the twofold requirement safety/efficiency. The safety is achieved removing front-end operators, directly exposed to the mine bursts. The efficiency is obtained with resort to managing strategic/tactical/execution flexibility with the integrated decision keeping aid of the mixed-mode automation. The proposed and developed RAMS solution is shown in Figure 3.
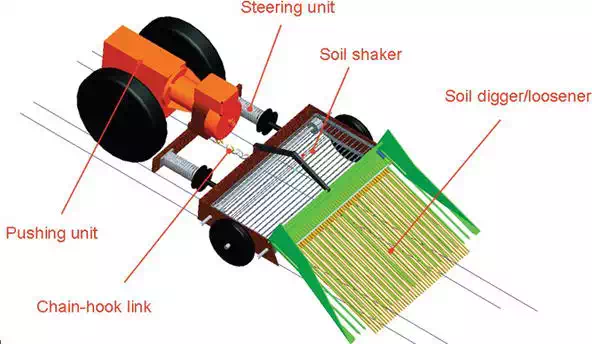
FIGURE 3.
Prospected solution.
This way the ‘robot’ are but enabling philosophy, not requiring to develop advanced contrivances, rather to exploit existing apparatuses (mostly obtained from current agricultural equipment), and to integrate them into self-sufficient demining rigs, composed by mobile carriers, with suited effectors, and remote command/steering devices, and into the proper operation methodologies, purposely developed to grant effective minesweeping.
OPERATIONAL TECHNIQUES FOR DEMINING ROBOTS
The RAMS operation management can be divided into three basic functions, planning, development and operation. Planning provides the mode of operation to accomplish the demining operator’s goals. Once detailed the demining resources and the management policies, the operation planning is obtained with resort to the usual ‘intelligent organisation’ paradigms, distinguishing the three flexibility horizons: strategic, tactical and execution (Figure 4)
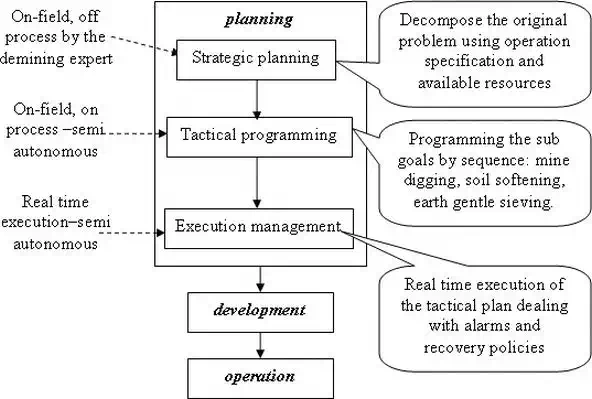
FIGURE 4.
The project-management cycle.
The development has two levels hardware pre-setting and software pre-setting. The hardware pre-setting is to establish the correct actuators and sensors configurations, while the software pre-setting is to organise the governing and alarm rules. The on-duty operation deals with the overall command architecture, and correspond to the real-time control under supervision of the operator. The strategic horizon deals with the off-process versatility, and, for example purpose, the investigation aims at maximising the process effectiveness in keeping with the series of the mobility providers and front-end effectors, actually, implemented; the programmes take into consideration the remote control accomplished by the on-the-field operator, which has the direct visibility of the remote-governed robot, with the connected instrumental data (course, speed, thrust, etc.); the tactical horizon deals with the on-process adaptivity, and, for example purpose, the mine-clearing tasks, done by the power-tiller endowed by the ground stripe lifting, are detailed by the high level ‘macro’ help, implementing the competing agendas; the pertinent decision aids are developed, with the issues brought to the attention of the operator, which might switch between the agendas, and, eventually, re-initialise the all duty-sequence, driven by the acknowledged ‘warning’.
The execution horizon deals with the on-duty warnings and the unexpected occurrences (equipment failure, mine deflagration, course stop dead, etc.), and, for example purpose, the above outlined software/hardware setting is acknowledged on multiple-level ‘alarm’ schedules, depending on the relative risk and frequency, every time detailing the restoring/healing requirements; the occurrence-driven recovery stops the ongoing tactical agenda, and requires the operator consent for the subsequent steps.
Conclusion
The humanitarian demining is urgent calamity in the developing countries, not easily faced by the traditional non-profit organisations, when they limit offering spot relief, without transferring to the suffering populations the real proficiency to become self-solvers.
The chapter provides the detailed comparison between different robotic solutions and the overview of a project established in the different spirit, of working out solutions through bottom-up involvement. The ‘robotics’, we have been dealing with all the study along, is quite awkward. The problem is to exploit the spirit of the technologies, because they are suited to offer solutions. Still the focus is on the «problems», only quite to a limited extent, on the ‘technologies’. Once the firmer ones are acknowledged, the way, to find out effective answers, is in sight, on condition that the committed operators accept to become their destiny rulers.