Parallel Linkages
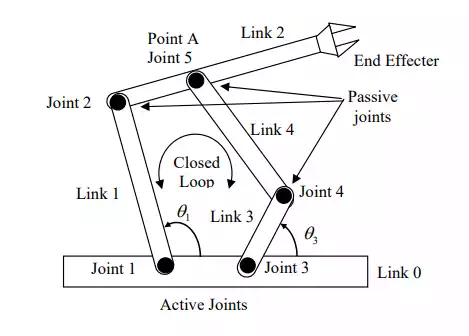
Primitive joints can be arranged in parallel as well as in series. Figure 3.2.1 illustrates such a parallel link mechanism. It is a five-bar-linkage consisting of five links, including the base link, connected by five joints. This can be viewed as two serial linkage arms connected at a particular point, point A in the figure. It is important to note that there is a closed kinematic chain formed by the five links and, thereby, the two serial link arms must conform to a certain geometric constraint. It is clear from the figure that the end-effecter position is determined if two of the five joint angles are given. For example, if angles 1? and 3? of joints 1 and 3 are determined, then all the link positions are determined, as is the end-effecter’s. Driving joints 1 and 3 with two actuators, we can move the end-effecter within the vertical plane. It should be noted that, if more than two joints were actively driven by independent actuators, a conflict among three actuators would occur due to the closed-loop kinematic chain. Three of the five joints should be passive joints, which are free to rotate. Only two joints should be active joints, driven by independent actuators.
Five-bar-link parallel link robot
This type of parallel linkage, having a closed-loop kinematic chain, has significant features. First, placing both actuators at the base link makes the robot arm lighter, compared to the serial link arm with the second motor fixed to the tip of link 1. Second, a larger end-effecter load can be born with the two serial linkage arms sharing the load. Figure 3.2.2 shows a heavyduty robot having a parallel link mechanism.
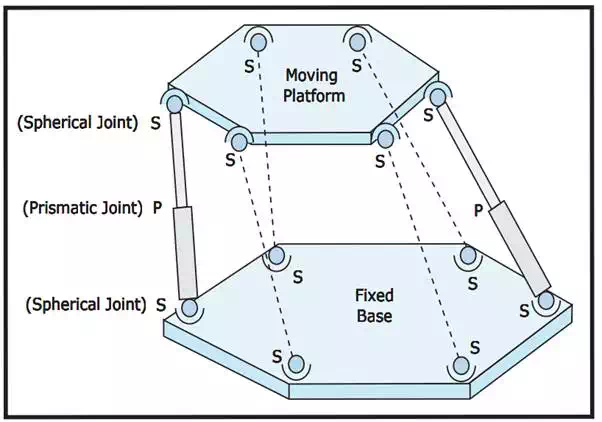
Stewart mechanism, which consists of a moving platform, a fixed base, and six powered cylinders connecting the moving platform to the base frame. The position and orientation of the moving platform are determined by the six independent actuators. The load acting on the moving platform is born by the six "arms". Therefore, the load capacity is generally large, and dynamic response is fast for this type of robot mechanisms. Note, however, that this mechanism has spherical joints, a different type of joints than the primitive joints we considered initially.
Stewart mechanism parallel-link robot