Brushless Dc Motors
The DC motor described in the previous section is the simplest, yet efficient motor among various actuators applied to robotic systems. Traditional DC motors, however, are limited in reliability and robustness due to wear of the brush and commutation mechanism. In industrial applications where a high level of reliability and robustness is required, DC motors have been replaced by brushless motors and other types of motors having no mechanical commutator. Since brushless motors, or AC synchronous motors, are increasingly used in robotic systems and other automation systems, this section briefly describes its principle and drive methods.
Construction of brushless DC motor and conventional DC motor
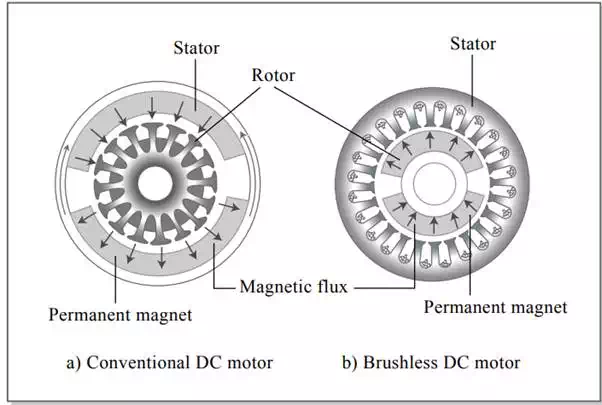
In the brushless motor, the commutation of currents is performed with an electronic switching system. Figure 2.6.1 shows the construction of a brushless motor, compared with a traditional DC motor. In the brushless motor, the rotor and the stator are swapped. Unlike the traditional DC motor, the stator of the brushless motor consists of windings, whereas the rotor comprises permanent magnets. The commutation is accomplished by measuring the rotor position using a position sensor. Depending on the rotor position, currents are delivered to the corresponding windings though electronic switching circuits. The principle of torque generation remains the same, and the torque-speed characteristics and other properties are mostly preserved. Therefore, the brushless motor is highly efficient with added reliability.
A drawback of this brushless motor design is that the torque may change discontinuously when switches are turned on and off as the rotor position changes. In the traditional DC motor this torque ripple is reduced by simply increasing the commutator segments and dividing the windings to many segments. For the brushless motor, however, it is expensive to increase the number of electronic switching circuits. Instead, in the brushless motor the currents flowing into individual windings are varied continuously so that the torque ripple be minimum. A common construction of the windings is that of a three-phase windings.
Let IA, IB and IC be individual currents flowing into the three windings shown in the figure. These three currents are varies such that:
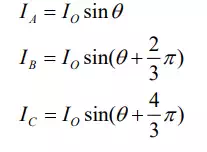
where IO is the scalar magnitude of desired current, and θ is the rotor position. The torque generated is the summation of the three torques generated at the three windings. Taking into account the angle between the magnetic field and the force generated at each air gap, we obtain
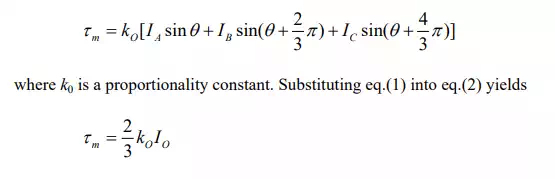
The above expression indicates a linear relationship between the output torque and the scalar magnitude of the three currents. The torque-current characteristics of a brushless motor are apparently the same as the traditional DC motor.
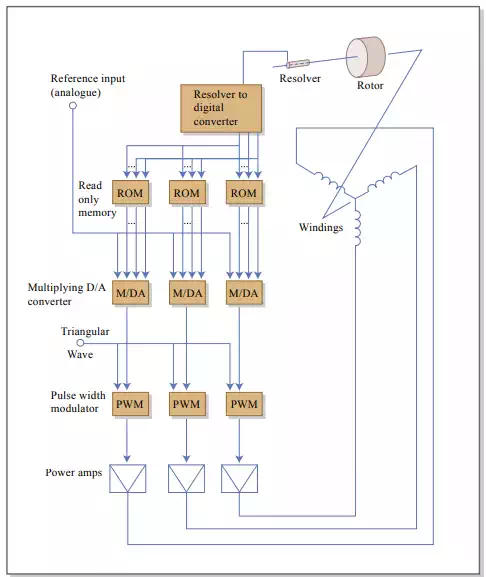
Brushless DC motor and drive amplifier