Hexapod Walker
Legged walkers are a class of robots that imitate the locomotion of animals and insects, using legs. Legged robots have the potential to transverse rough terrains that are impassable by standard wheeled vehicles. It is with this in mind that robotics are developing walker robots.
Imitation of Life
Legged walkers may imitate the locomotion style of insects, crabs, and sometimes humans. Biped walkers are still a little rare, requiring balance and a good deal more engineering science than multilegged robots. A bipedal robot walker is discussed in detail in Chap. 13. In this chapter we will build a six legged walker robot.
Six Legs—Tripod Gait
Using a six legged model, we can demonstrate the famous tripod gait used by the majority of legged creatures. In the following drawings a dark circle means the foot is firmly planted on the ground and is supporting the weight of the creature (or robot). A light circle means the foot is not supporting any weight and is movable.
our walker at rest. All six feet are on the ground. From the resting position our walker decides to move forward. To step forward, it leaves lifts three of its legs (white circles), leaving its entire weight distributed on the remaining three legs (dark circles). Notice that the feet supporting the weight (dark circles) are in the shape of a tripod. A tripod is a very stable weight supporting position. Our walker is unlikely to fall over. The three feet that are not supporting any weight may be lifted (white circles) and moved without disturbing the stability of the walker. These feet move forward.
Sample biological tripod gait.
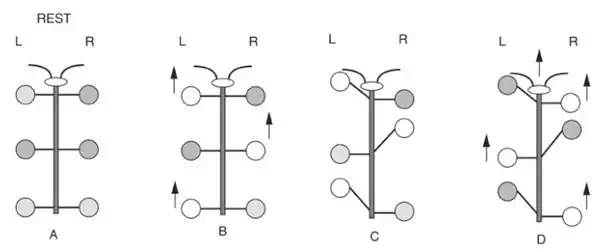
illustrates where the three lifted legs move. At this point, the walker’s weight shifts from the stationary feet to the moved feet (see Fig. 10.1D). Notice that the creature’s weight is still supported by a tripod position of feet. Now the other set of legs moves forward and the cycle repeats. This is called a tripod gait, because a tripod positioning of legs always supports the weight of the walker.
Three Servo motor Walker Robot
The robot we will build is shown in Fig. 10.2. This walker robot is a compromise in design but allows us to build a six legged walker using just three servomotors. The three servomotor hexapod walker demonstrates a true tripod gait. It is not identical to the biological gait we just looked at, but close enough.
This legged hexapod uses three inexpensive HS322 (42oz torque) servomotors for motion and one PIC 16F84 microcontroller for brains. The microcontroller stores the program for walking, controls the three servomotors, and reads the two sensor switches in front. The walking program contains subroutines for walking forward and backward, turning right, and turning left. The two switch sensors positioned in the front of the walker inform the microcontroller of any obstacles in the walker’s path. Based on the feedback from these switch sensors, the walker will turn or reverse to avoid obstacles placed in its path.
Function
The tripod gait I programmed into this robot isn’t the only workable gait. There are other perfectly usable gaits you can develop on your own. Consider this walking program a working start point. To modify the program, it’s important to understand both the program and robot leg functions. First let’s look at the robot.
Hexapod robot.
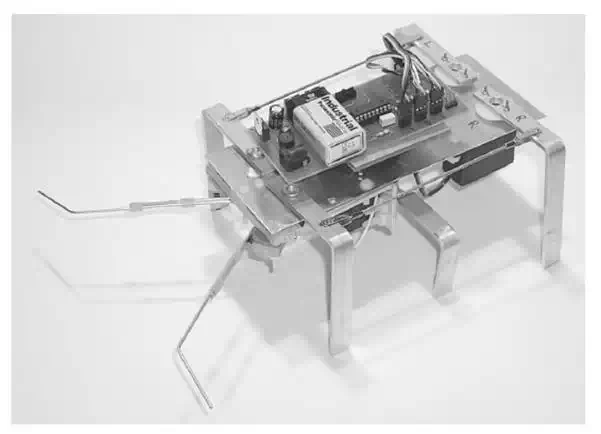
At the rear of the walker are two servomotors. One is identified as L for the left side, the other as R for the right side. Each servomotor controls both the front and back legs on its side. The back leg is attached directly to the horn of the servomotor. It is capable of swinging the leg forward and backward. The back leg connects to the front leg through a linkage. The linkage makes the front leg follow the action of the back leg as it swings forward and back. The third servomotor controls the two center legs of the walker. This servomotor rotates the center legs 20° to 30° clockwise (CW) or counterclockwise (CCW), tilting the robot to one side or the other (left or right). With this information we can examine how this legged robot will walk.
Moving Forward
We start in the rest position as before, each circle represents a foot, and the dark circles show the weightbearing feet. Notice in the rest position, the center legs do not support any weight. These center legs are made to be 1 /8 in shorter than the front and back legs.
In position A the center legs are rotated CW by about 25° from center position. This causes the robot to tilt to the right. The weight distribution is now on the front and back right legs and the center left leg. This is the standard tripod position as described earlier. Since there is no weight on the front and back left legs, they are free to move forward as shown in the B position
Forward gait for hexapod robot
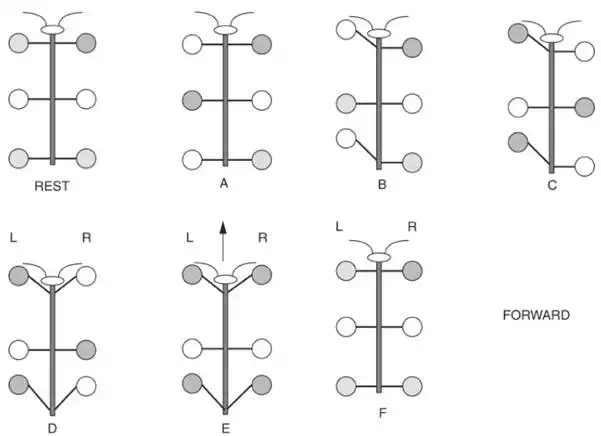
In the C position the center legs are rotated CCW by about 25° from center position. This causes the robot to tilt to the left. The weight distribution is now on the front and back left legs and the center right leg. Since there is no weight on the front and back right legs, they are free to move forward, as shown in the D position.
In position E the center legs are rotated back to their center position. The robot is not in a tilted position so its weight is distributed on the front and back legs. In the F position, the front and back legs are moved backward simultaneously, causing the robot to move forward. The walking cycle can then repeat.
Moving Backward
We start in the rest position (see Fig. 10.4), as before. In position A the center legs are rotated CW by about 25° from center position. The robot tilts to the right. The weight distribution is now on the front and back right legs and the center left leg. Since there is no weight on the front and back left legs, they are free to move backward, as shown in the B position
Backward gait for hexapod robot.
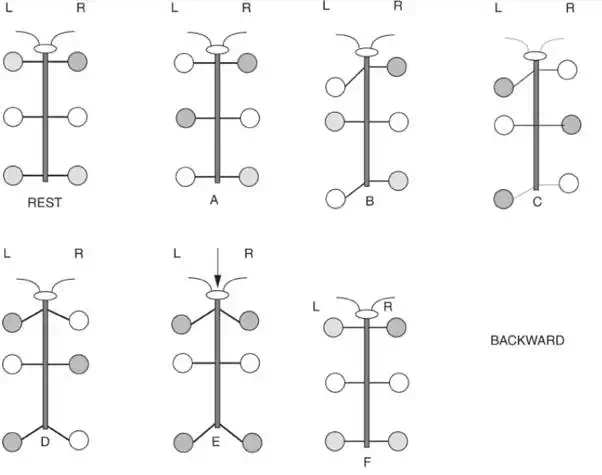
In the C position the center legs are rotated CCW by about 25° from center position. The robot tilts to the left. Since there is no weight on the front and back right legs, they are free to move backward, as shown in the D position. In position E the center legs are rotated back to their center position. The robot is not in a tilted position, so its weight is distributed on the front and back legs. In the F position, the front and back legs are moved forward simultaneously, causing the robot to move backward. The walking cycle can then repeat.
Turning Left
The leg motion sequence to turn left is shown in Fig. 10.5. In position A the center legs are rotated CW by about 25° from center position. The robot tilts to the right. The weight distribution is now on the front and back right legs and the center left leg. Since there is no weight on the front and back left legs, they are free to move forward.
In the B position, the center legs are rotated CCW by about 25° from center position. The robot tilts to the left. Since there is no weight on the front and back right legs, they are free to move backward, as shown in the C position.
Turning left gait for hexapod robot.

In position D, the center legs are rotated back to their center position. The robot is not in a tilted position, so its weight is distributed on the front and back legs. In position, the left legs moved backward while the right legs moved forward, simultaneously causing the robot to turn left. It typically takes three turning cycles to turn the robot 90°.
Turning Right
Turning right follows the same sequence as turning left, with the leg positions reversed.