Manipulation and Dexterity
Contemporary industrial needs drive the applications of robots to ever more advanced tasks. Robots are required to perform highly skilled jobs with minimum human assistance or intervention. To extend the applications and abilities of robots, it becomes important to develop a sound understanding of the tasks themselves.
In order to devise appropriate arm mechanisms and to develop effective control algorithms, we need to precisely understand how a given task should be accomplished and what sort of motions the robot should be able to achieve. To perform an assembly operation, for example, we need to know how to guide the assembly part to the desired location, mate it with another part, and secure it in an appropriate way. In a grinding operation, the robot must properly position the grinding wheel while accommodating the contact force. We need to analyze the grinding process itself in order to generate appropriate force and motion commands.
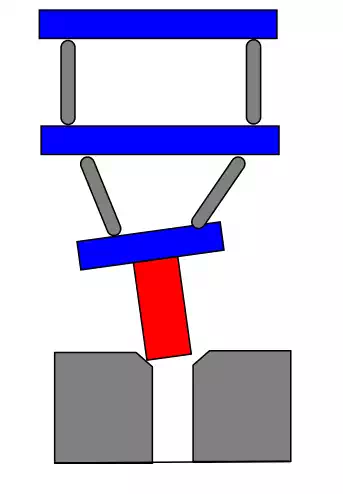
Remote-center compliance hand
A detailed understanding of the underlying principles and "know-how" involved in the task must be developed in order to use industrial robots effectively, while there is no such need for making control strategies explicit when the assembly and grinding operations are performed by a human worker. Human beings perform sophisticated manipulation tasks without being aware of the control principles involved. We have trained ourselves to be capable of skilled jobs, but in general we do not know what the acquired skills are exactly about. A sound and explicit understanding of manipulation operations, however, is essential for the long-term progress of robotics. This scientific aspect of manipulation has never been studied systematically before and represents an emerging and important part of robotics research.
Locomotion and Navigation
Robotics has found a number of important application areas in broad fields beyond manufacturing automation. These range from space and under-water exploration, hazardous waste disposal, and environment monitoring to robotic surgery, rehabilitation, home robotics, and entertainment. Many of these applications entail some locomotive functionality so that the robot can freely move around in an unstructured environment. Most industrial robots sit on a manufacturing floor and perform tasks in a structured environment. In contrast, those robots for non-manufacturing applications must be able to move around on their own
Locomotion and navigation are increasingly important, as robots find challenging applications in the field. This opened up new research and development areas in robotics. Novel mechanisms are needed to allow robots to move through crowded areas, rough terrain, narrow channels, and even staircases. Various types of legged robots have been studied, since, unlike standard wheels, legs can negotiate with uneven floors and rough terrain. Among others, biped robots have been studied most extensively, resulting in the development of humanoids, as shown in Figure 1-9. Combining leg mechanisms with wheels has accomplished superior performance in both flexibility and efficiency. The Mars Rover prototype shown below has a rocker-buggy mechanism combined with advanced wheel drives in order to adapt itself to diverse terrain conditions.
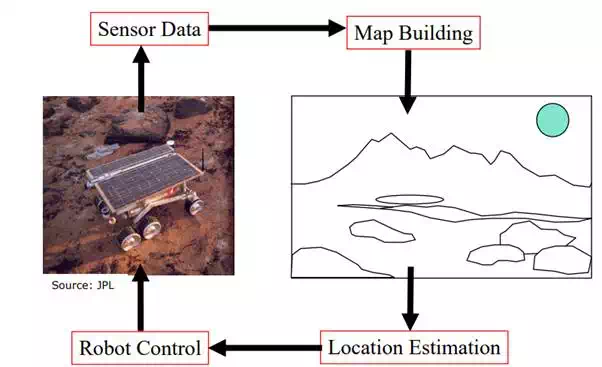
Navigation is another critical functionality needed for mobile robots, in particular, for unstructured environment. Those robots are equipped with range sensors and vision system and are capable of interpreting the data to locate themselves. Often the robot has a map of the environment and uses it for estimating the location. Furthermore, based on the real-time data obtained in the field, the robot is capable of updating and augmenting the map, which is incomplete and uncertain in unstructured environment. As depicted in Figure 1-10, location estimation and map building are simultaneously executed in the advanced navigation system. Such Simultaneous Location and MApping (SLAM) is exactly what we human do in our daily life, and is an important functionality of intelligent robots.
The goal of robotics is thus two-fold: to extend our understanding about manipulation, locomotion, and other robotic behaviors and to develop engineering methodologies to actually perform desired tasks. The goal of this book is to provide entry-level readers and experienced engineers with fundamentals of understanding robotic tasks and intelligent behaviors as well as with enabling technologies needed for building and controlling robotic systems.
JPL’s planetary exploration robot: an early version of the Mars Rover