Sensors
Simple switch sensors are used to turn on and off the whole cycle or some part of the cycle.

Simple switch
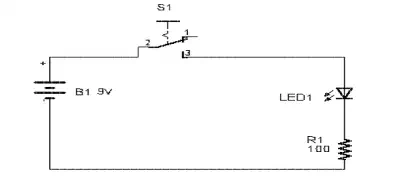
Simple circle with simple switch
Force sensor is to measure and control the force power applied. These are mostly in use in the robot end-effectors to measure how strong the grip should be so it does not smash work pieces. They are different models with different applications for example variable force control, load and compression sensing, pumps, contact sensing, weighing and household appliances

Force sensor
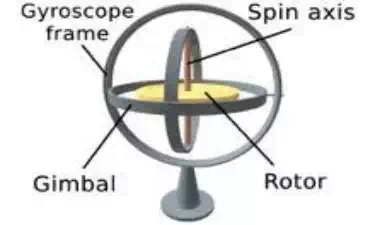
Gyroscopes: Is a device for measuring and maintaining orientation, based on the principles of momentum. In essence, a mechanical gyroscope is a spinning wheel or disc whose axle is free to take any orientation. Although this orientation does not remain fixed, it changes in response to an external torque much less and in a different direction than it would without the large angular momentum associated with the disk's high rate of spin and moment
Potentiometer has the same task as encoder but uses different method for measuring degree of rotation, it convert the analogue voltage value from 0 - 10 volt to digital signal bit, which give how many degree of rotation in the motor drive. In picture 3.18 a potentiometer is mounted at the gear motor which enables the DC motor controller to measure the position of the axle.
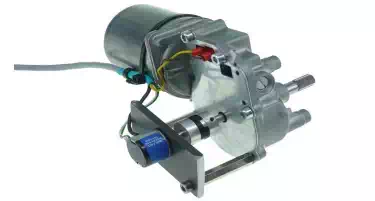
Servo motor with Potentiometer
Digital rotary Encoder is for measuring rotating degree of a shaft by using lines which define the degrees of rotation and to give the position of a shaft. On other way we can say the same work as potentiometer, but they are using different method for measuring degree of rotation
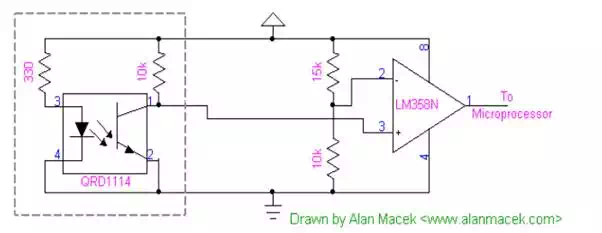
Wheel encoder circle

Wheel encoder
Tachometer Essentially is a generator. Depending on the velocity of the shaft, you get certain amount of voltage output and this amount is measured by tachometer to give us visual feedback about the motor state. It is used for controlling and adjusting. Sometimes tachometer information is obtained from an encoder.

Tachometer Digital tachometer
Cameras are used to locate object in the robot environment. They are equal for vision system in human.

Vision system in robot
Proximity sensors: A sensor is able to detect or recognize the presence of close objects without any physical contact with them; there are different types of these sensors which are mechanical or infrared by using light. A proximity sensor often emits an electromagnetic force or a beam of electromagnetic radiation (for instance infrared), and looks for changes in the field by reading the return signal. The object being sensed is often referred to as the proximity sensor's target. Different proximity sensor targets demand different sensors. For example, a capacitive or photoelectric sensor might be suitable for a plastic target; an inductive proximity sensor requires a metal target.

Proximity sensor from Omron