Types of Groups and Teams
How would you program a bunch of robots to play soccer

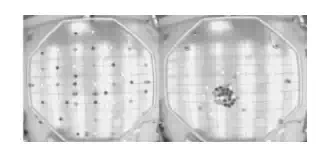
A wheeled robot and a six-legged robot cooperatively pushing a box.
Would you program each robot to act is if it were alone – to chase the ball and try to take it, run for the goal and shoot, and run back and protect its own goal or goalie? What would happen if you did? (What would happen if that were how people played soccer?) It would be a complete mess! All robots would run around and into each other, trying to play both offense and defense, and getting into each other’s way. Soccer, like most other group DIVISION OF LABOR activities, requires teamwork and some type of division of labor or role assignment, giving each member of the team a job so each knows what to do to help the team as a whole without getting in the way of the others.
Do all group tasks require division of labor? What about foraging? Could you just have a group of identical robots all doing foraging and staying out of each other’s way?
Definitely. This shows us that there are different types of tasks and different types of collective multi-robot systems. First, teams can be most easily divided into two types, based on the individuals that constitute them:
Homogeneous teams are those with identical, and therefore interchangeable, members. Members may be identical in their form (such as all having four wheels and a ring of sonars) and/or in their function (such as all being able to find and pick up objects and send messages to other team members). Homogeneous teams can be coordinated with simple mechanisms, and in some cases require no active, intentional cooperation to achieve effective group behaviour.
A highly effective foraging group of merely coexisting robots.
Heterogeneous teams are those with different, non-interchangeable members. Members may differ in form (some have four wheels, while others have two wheels and a caster) and/or in function (some play offense by chasing the ball while some play defense by getting in the way of opponents). Heterogeneous teams typically require active cooperation in order to produce coordinated behaviour.
Figures show examples of real-world robot teams pushing boxes. Both teams are heterogeneous, but one is heterogeneous only in form (different bodies, same function), while the other is heterogeneous in both form and function. Can you tell which is which? The first, a three-member team, features members with different roles: two pushers and a watcher, so it is heterogeneous in both form and function. The second, a two-member team, features two members with different from (wheels vs. legs) but identical function (pushing the box).
The next way of classifying robot teams is based on the type of coordination strategy they use:
Merely coexisting: In this approach, multiple robots work on the same task in a shared environment, but do not communicate or, in some cases, even recognize each other. They merely treat each other as obstacles. Such systems require no algorithms for coordination or communication, but as the number of robots grows and the environment shrinks, interference increases, quickly removing any benefit of having a group. Foraging, construction, and other tasks can be achieved with this approach as long as the team size is

The Nerd Herd, one of the first multi-robot teams, flocking around the lab.
carefully designed to suit the task and environment so that interference is minimized.
Let’s take a closer look, using the foraging example: We have a group of foraging robots whose job is to look over a field for scattered objects, pick them up, and bring them back to a particular deposit location. While they do that task, they must avoid collisions with obstacles, including other robots. You can see how the more robots are doing the task, the more potential interference there is between them, as long as they are in a bounded, limited amount of space (which is reasonable to expect, since foraging in the vastness of outer space is not currently a major robotics application). In this approach, the robots do not help each other or even recognize each other. Therefore, to make this work, there is a carefully designed balance among the task parameters (including the size of the space and the number of objects being collected), the number of robots, their physical size relative to the environment, their sensor range, and their uncertainty properties. As you can see, this takes some work. Figure shows a group of robots that very effectively collected objects into a single pile through merely coexisting. We’ll see later how they did it.
Loosely coupled: In this approach, the robots recognize each other as members of a group and may even use simple coordination, such as moving away from each other to make space and minimize interference. However, they do not depend on each other for completing the task, so members of the group can be removed without influencing the behaviour of the others. Such teams are robust, but difficult to coordinate to do precise tasks. Foraging, herding, distributed mapping, and related group tasks are well suited for this approach.
Back to our foraging example. Now, instead of treating each other as obstacles, the robots can actually react to each other in more interesting ways. For example, a robot that has found no objects can follow another robot that is carrying an object, in hopes that it will lead it toward more objects. Alternatively, a robot can avoid other robots under the assumption that it should go where others haven’t been yet, and so find as yet undiscovered objects. The robots can also flow or form lanes as they are heading to deposit the objects, in order to minimize interference.
Tightly Coupled: In this approach, the robots cooperate on a precise task, usually by using communication, turn-taking, and other means of tight coordination. They depend on each other, which gives the system improved group performance, but also less robustness through redundancy. Removing team members makes the team performance suffer. Playing soccer, moving in formation, and transporting objects are done well through the use of tightly coupled teams.
Returning to foraging yet again: A tightly coupled foraging team would likely use a global plan in which each member of the team goes to a specific area of the environment to explore. This is convenient when a map of the area is available. If no map is given, then the robots may use collaborative SLAM to build one as they coordinate their exploration and object collection.