Required studies in robotics
It is multidimensional area which uses almost all of the engineering studies. These studies are mechanical engineering, electronic sensors, actuators, computer sciences and artificial intelligence
Extrapolating from nature
As an example humans and animals have arms and fingers to manipulate objects. Legs for locomotion, muscles as actuators, eyes provide vision, nose for smelling, ears for hearing, tongue for tasting, skin for feeling and nerves for communication between the brain and actuators.
Comparing robots to humans
Manipulation is equal to Arms and fingers driven by motors and other forms of actuation. Vision is equal to camera. Hearing is equal to microphone. Feeling is equal to tactile sensors. Communication is equal to wires, fiber optics and radio. Brain is equal to computers and microprocessors. Smell and taste are still under development (Matti Pitkälä, Lecture on Lahti University of Applied sciences 2011).
Programming a robot by teaching method
The same technique we use to teach children to write the alphabet by holding the child’s hand and going through the writing process step by step. When we are teaching the robot to do a certain job we control the movement of the robot hand or end effector at the same time we record the motion of each individual joints. Then we play back the recording and the robot begins to move independently as taught. The quality of recording results in the work carried out. This work is carried out by a skilled worker. When the work arrives on a conveyer to the robot, the robot replays the stored recording then robot performs the required task. Other ways to teach a robot to undertake certain tasks is by use of a program that creates a virtual world. Then we stimulate the work to be carried out by the robot’s joint motion parameters stored in the memory. The robot is then capable of replaying the recording.
Typical programming of an industrial robot
Industrial robot is programmed by moving objects from position 1 to position 5 by moving joints vertically or horizontally to pick up and place an object through the following steps:
Define points from P1 to P5:
1. Safely move above work piece (defined as P1)
2. 10 cm above work piece (defined as P2)
3. At position to take work piece from conveyer (defined as P3)
4. 10 cm above conveyer with low speed (defined as P4)
5. At position to leave work piece (defined as P5)
Define program:
1. Move to P1
2. Move to P2
3. Move to P3
4. Close gripper
5. Move to P2
6. Move to P4
7. Move to P5
8. Open gripper
9. Move to P4
10. Move to P1 and finish
Accuracy and repeatability of addressable points
Repeatability is the playback of the recording of the position of joint space when we try to program a robot through teaching method and it describes how precise the robot to return to the stored position.
Accuracy is connected to repeatability. “The precision with which a computed point can be attained is called the accuracy of the manipulator”
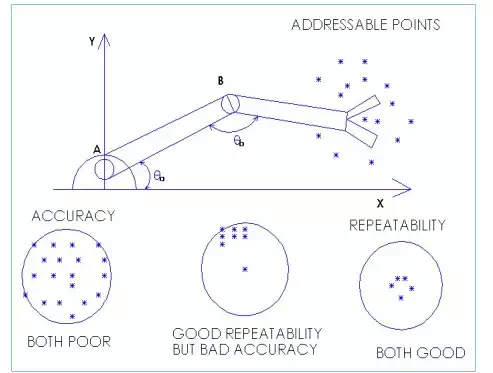
Example of good and bad accuracy