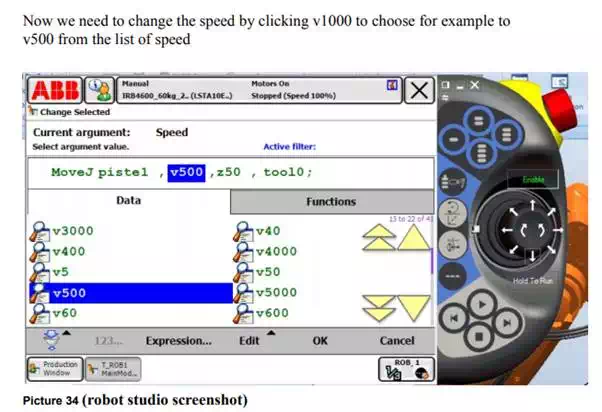
Create program using virtual flex pendant part -2
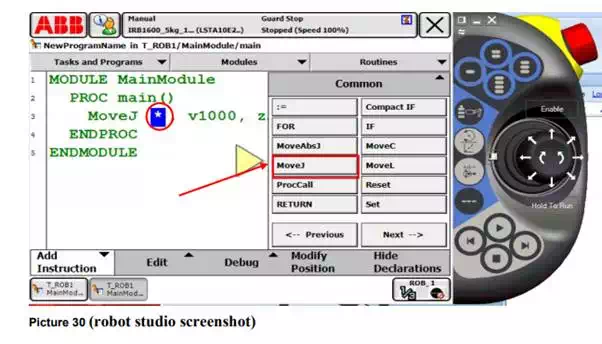
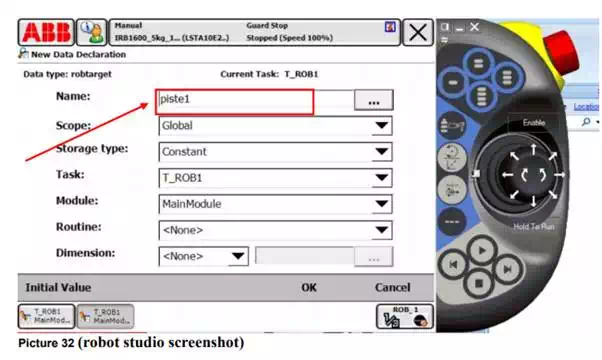
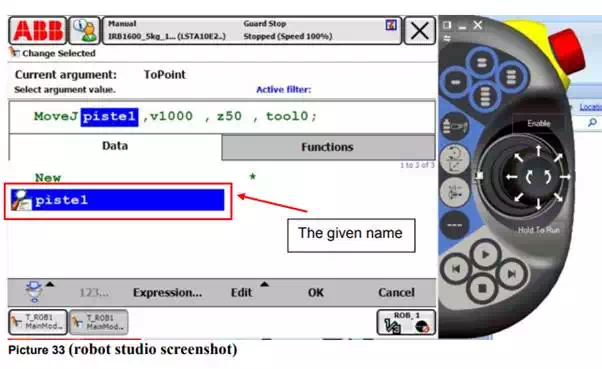
We first move the robot coordinate of one joint then we stop to save the movement by clicking move joint J click. Then we paint just the star (*) and double click the star the it open new window like in picture 3 then we give name for the movement for example pist1

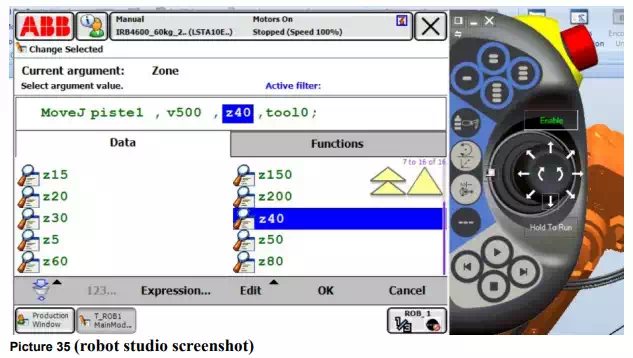
Now we need to change the curve radius motion by clicking z50 to choose for example to z40 from the list of curve list.
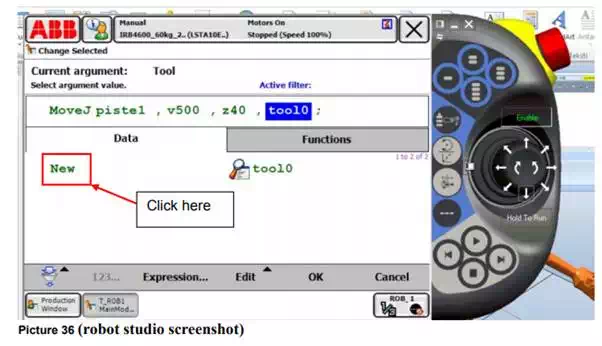
Now we can change tool name by clicking new so new window open to rename your tool name or select tool from tool list.
We repeat the same step many times by using the same previous procedure .
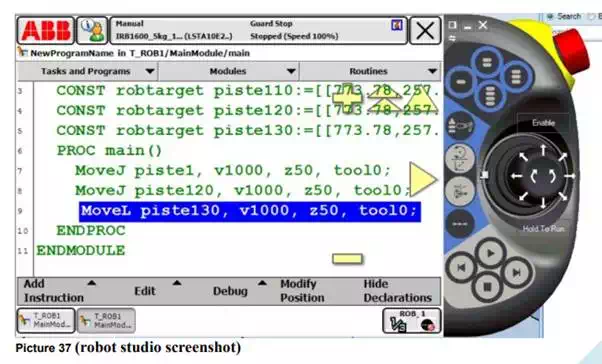
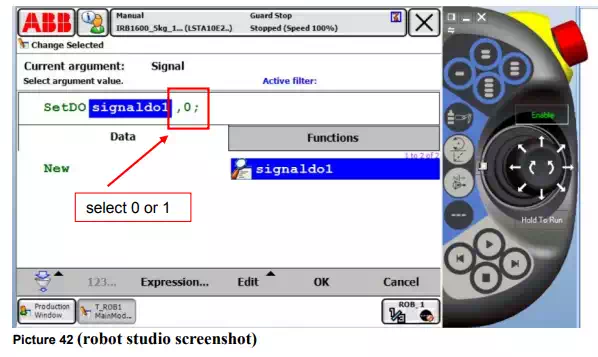
Now we need to give command pick up and pick off the object we click first on command up then 1/0
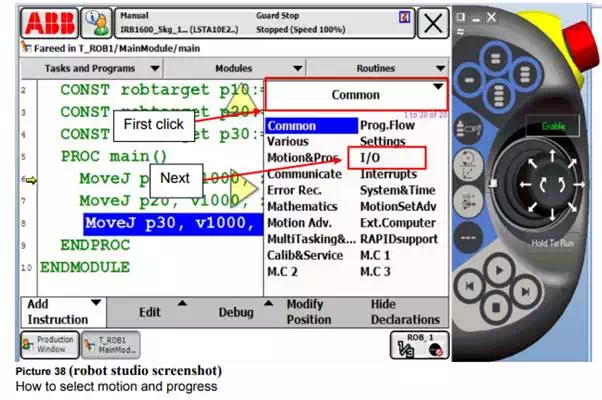
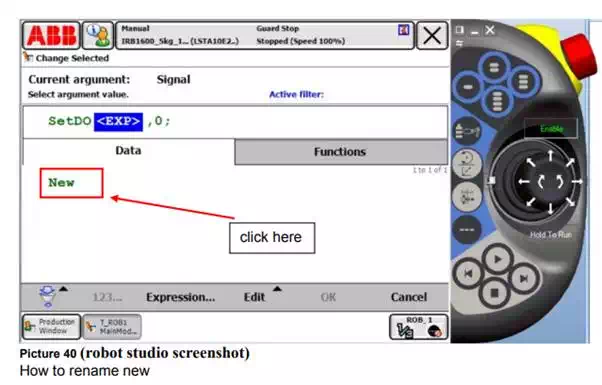
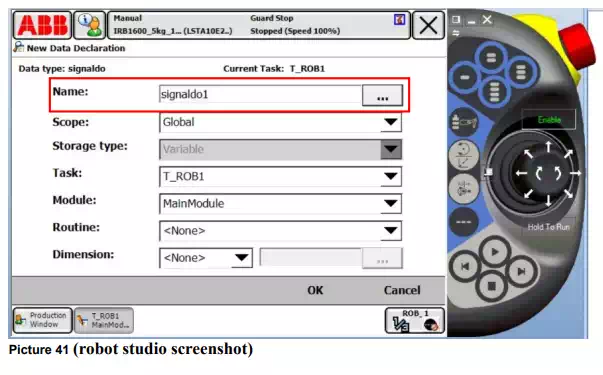
We rename it here.
Notice: When you select number 1 then you choose to pick up the object but when you select 0 the you choose to leave the object
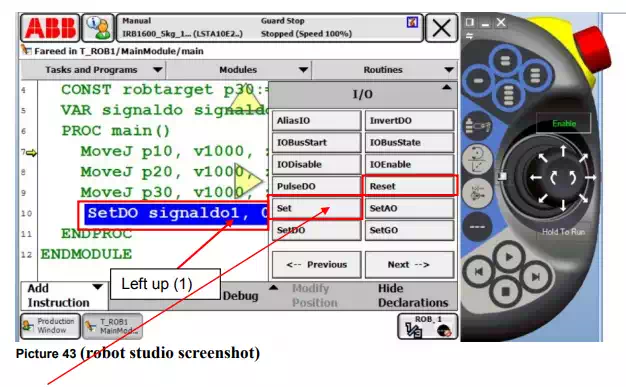
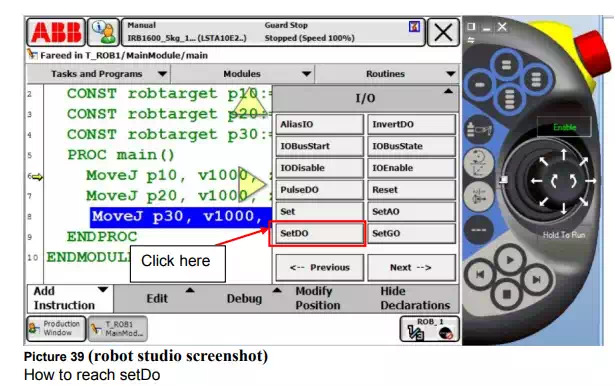
Notice: We can also use the command set (1) and reset (0) for tool to pick up object and to leave it. The command set and reset is more simple to use for example set is to pick up and reset to leave object.
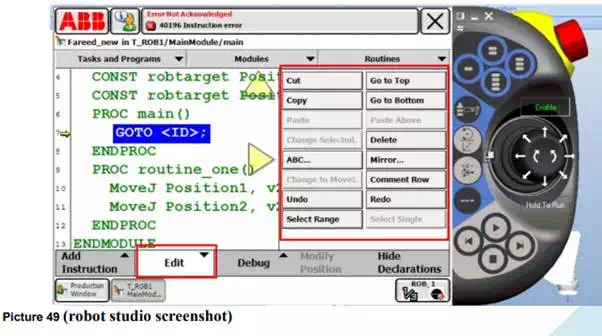
Edit command we can use to copy and paste and some other command instruction in the following Icon.
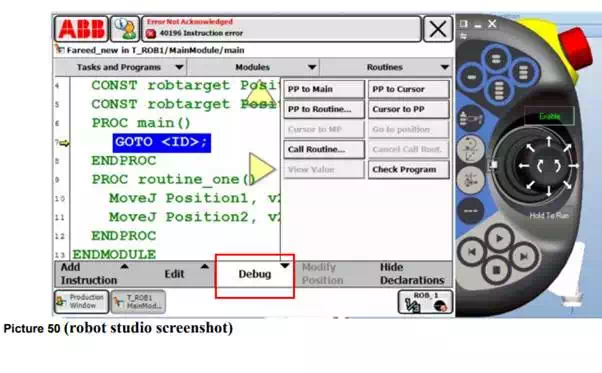
Finally debug command for simulation and running the program.