Trajectory Planning In Robotics
Introduction
In this section I will try to cover how to make a path around trajectory, the base of creating path, what is the required data for creating path and how we can make the system to choose the speed, also time and acceleration when we just define the basic required data for trajectory planning.
Required data for trajectory planning
When we think about trajectory we mainly focus in moving object from position A to position B.
In trajectory planning we try to define first the following data
· Initial point
· Final point
· Via point: intermediate point between initial and final points.
Point to point planning is a continuous path motion like in welding for example. How we plan point to point: First we define task specification.
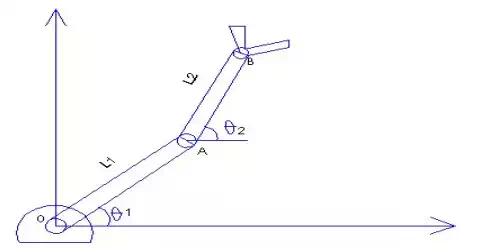
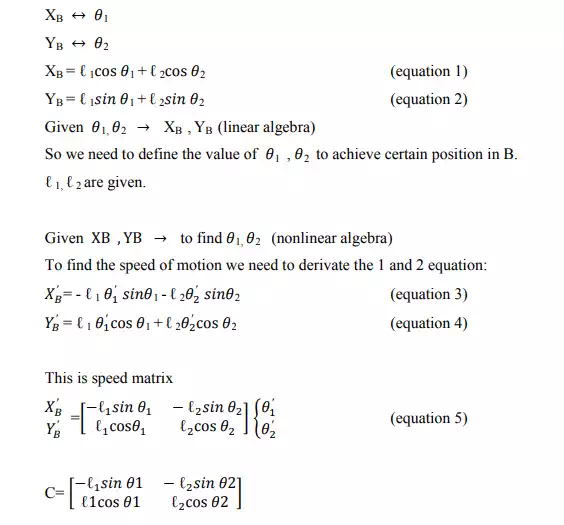
Mapping:
· World coordinate
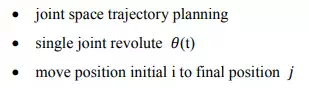
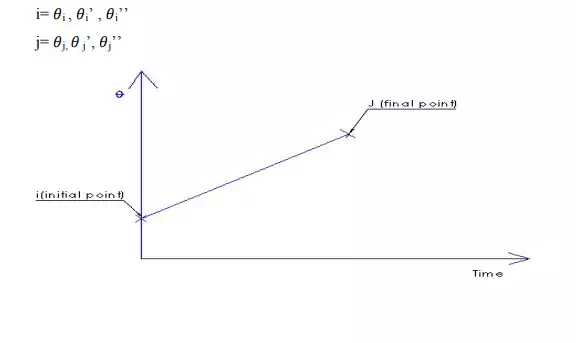
· Joint space
 Constraints
Constraints
In order to make smooth motion we need to put some constraints between via points through via points because of intermediate point (obstacles) within specified duration of time
![]()
Robot should Move from initial points to final points through via points because of intermediate point (obstacles) within specified duration of time.
Subject to constraints