Transformation
We use matrices to transform vectors.
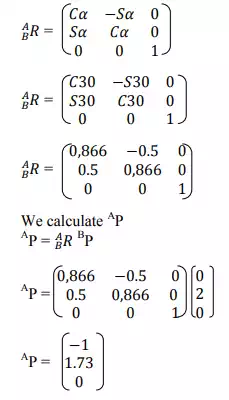
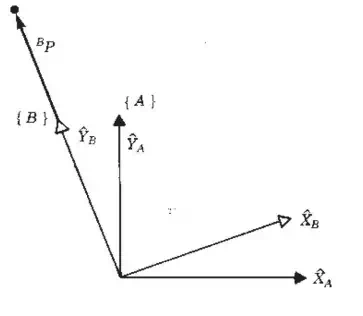
Example: In the following picture frame B rotates around frame A about z axis by 30 Here Z axis is pointing out of the page B P (0 2 0)
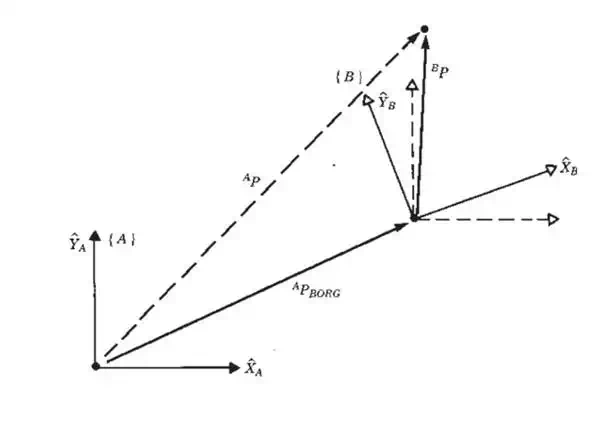
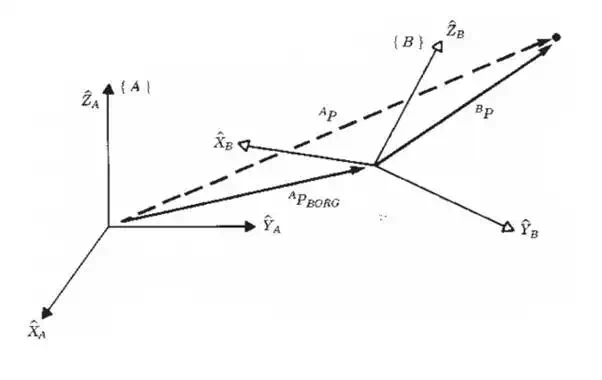
Mapping involving general frames
We need to know how we can get the parameters of A P which parameters are given in frame B and the parameters of A PBORG are given (Craig 2005, 27-28). We use the following formula
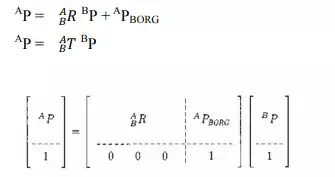
We notice
1. That we add just for rotation matrix one row of zeros (0 0 0). 2. For vector´s coordinates we add number 1 below all of them. 3. This kind of matrix is called homogeneous transform (4x4).
Example:
Frame B has rotated with relative to frame A bout Z axis by 30 degrees and