Trajectory Definition
This example is how to move the box from position p1 to final position p4 during t1 to t4
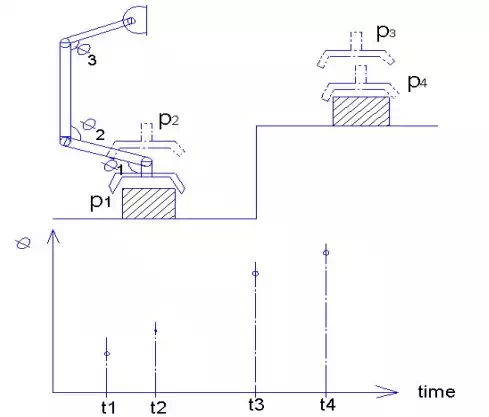
Moving object from position 1 to position 4
Solution:
First we need to calculate ![]() at t1, t2, t3, t4. Then we need
to calculate the position of the links. This kind of problem can be called
inverse kinematics. We should be careful that during motion no accident
happens. Given s at each moment determines the position and orientation of all
links.
at t1, t2, t3, t4. Then we need
to calculate the position of the links. This kind of problem can be called
inverse kinematics. We should be careful that during motion no accident
happens. Given s at each moment determines the position and orientation of all
links.
Forward position problem
Fixed parameters of the mechanisms values of joint variables will determine position and orientations of all links.
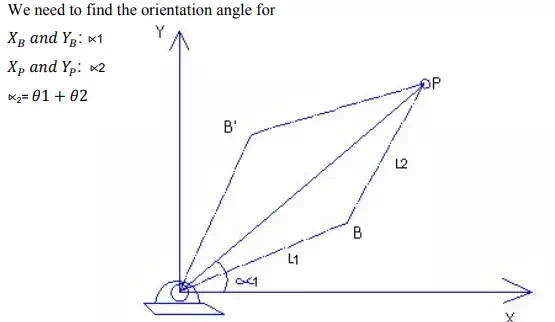
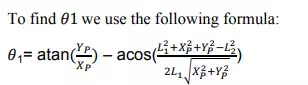
Inverse position problem
Fixed bars of the mechanisms position, and orientations of end effector will determine the values of joint variables.
Simple example with planar 2R

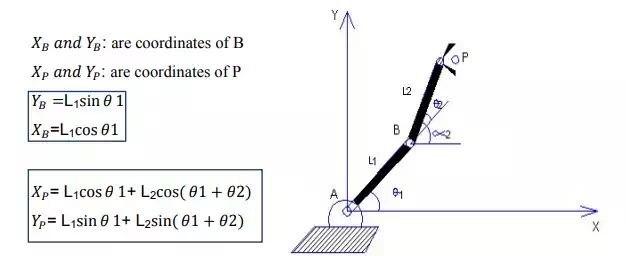
2R Manipulator
Sketching the position
Example1:
This is a numerical example for 2 planar:
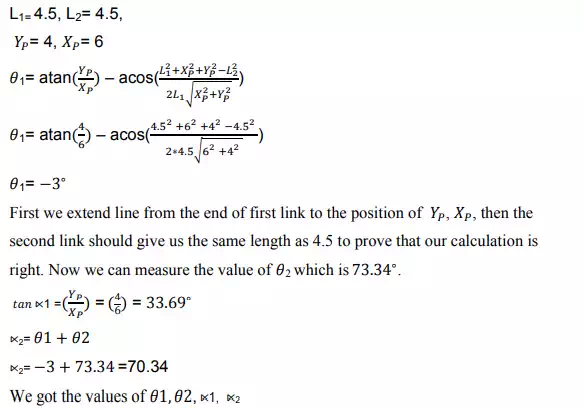
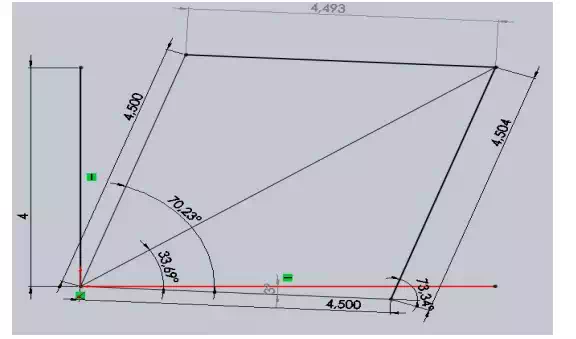
The solution drawn in SolidWorks