Main types of an industrial robot
There are two main types of industrial robot the first one is called an Industrial manipulated and the second one is automated guide vehicles robot.

Industrial robot
For example if you think of your hand when you use it to pick up a pencil, there is rolling motion on the rest, but you don’t use this motion while writing, so you eliminate this motion because the axis is symmetrical. These six motor motions we called six axis which are driven independently.
Main robot motions
Robot types according to their motion
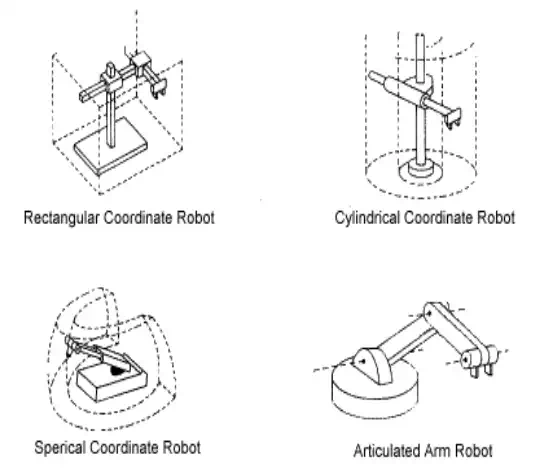
Rectangular coordinate motion (Cartesian):
there are three different motions which are X, Y, Z or in other word this robot can move up and down, left and right, backward and forward, but it has no rotation or degrees. In this kind of model it is easy to control motion just by giving the coordinates, then a robot moves according to (x, y, z) values.
Cylindrical coordinate Robot: it has rotational movement on the base and Cartesian motion in the upper part.
Spherical coordinate robot: is a robot with two rotary joints and one prismatic joint.
Articulated arm robot: it looks like human arms base rotational like a shoulder, an elbow and a rest which give us more motion with certain angels which is not possible by Cartesian robot. This model is more complicated to control because you need to calculate angles, velocity and acceleration to get a desired motion and requires solving plenty of equation.
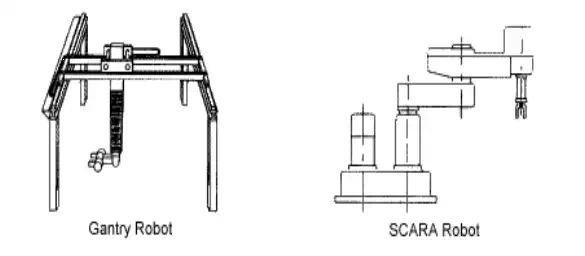
Gantry robot: is a linear motion robot and has another industrial name as a linear robot.
Scara robot: is created by Japanese 1979 for assembly tasks because it moves in two planes. It is simple to use in assembly operation, when you need to tight a screw and to hold it vertically then to rotate the screw and push down you don’t require very big sophisticated robot, so Scara robot is the best choice for a similar operation or like pushing object down like gear box and so on.

Scara robot
All these models are used by engineers and every model has positive and negative sides. Depended on the job requirement we try to choose the right model to suite our requirement
Scara robot vs articulated robot:
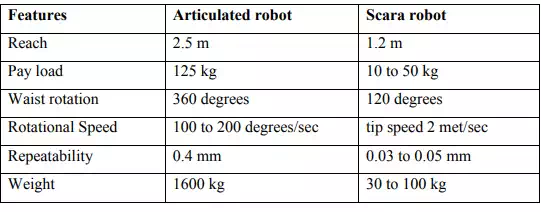
There is even more features to compare but these are the main features that can make the difference between an articulated robot and a Scara robot.
End effectors
Is a robot hand that grabs an object and moves it from one place to another. In the end effectors usually there are three rotational motions with three different motors and it equal human rest for lifting objects. End effector are different model with different task option.

Robot end effector
End effectors motions are three: Rotating motion, up and down motion with angle, holding object motion.
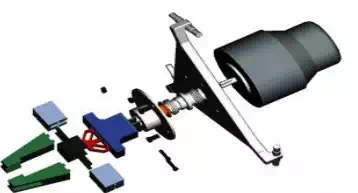
Robot end effector
Notice: since the motor drive is heavy it would be better, if we put all the motors on the base and try to move them through linkages, cables and pulleys so we do not need to carry heavy load.