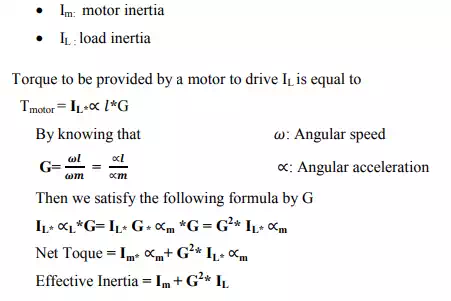
Controlling inertia
We have to find two inertias
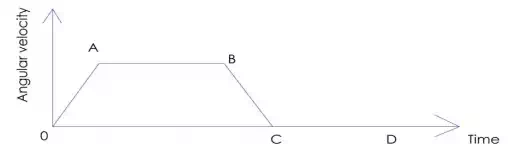
Angular velocity with respect of time
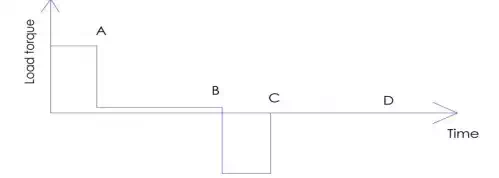
Load torque with respect of time
In Above figure the sum of torque from 0 to A = to sum of torque A to B +B to C
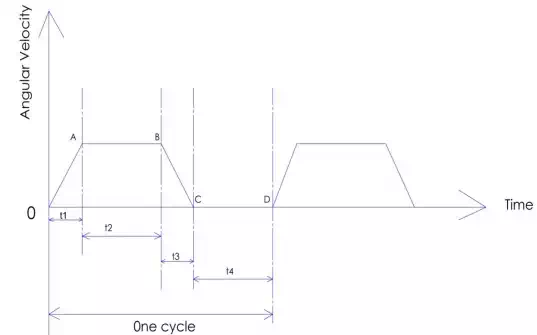
Angular velocity with respect of several period of time
From 0 to A during time t1 according to above figure
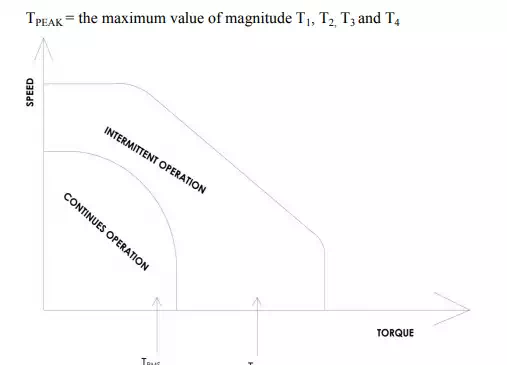
Diagram for selecting suitable motor drive
Resolution
The resolution of a stepper motor
Assume that we connect stepper motor on a screw with nut on the screw, then we run the motor drive forward and backward then nut begin to move with the movement of stepper motor and there is minimum distance that nut can’t go below which is the limit, this some kind of example of motor drive resolution.

Servo motor with screw ball
Servo motor drive gets feedback from an encoder or a potential meter
Resolution depends on the number of lines inside encoder, the more resolution you want the more expensive encoder and the more lines it has. For example, encoder that has 360 lines means that it has one degree of resolution, but it cannot go below one degree.

Optical incremental rotary encoder
Potential meter uses different method, which is analogue signal, which is converted to digital through electronics. Example: let us assume potential meter signal is 10 volt which equal 8 bit then: 2 8 = 256-digit 360o / 256= 1.4 Resolution per step.