Kinematic and Biodynamic Model of the Long Jump Technique
The long jump consists of four interconnected phases: approach, take-off, flight and landing. According to some existent studies [2, 6, 9, 11], the approach and take-off are the most important factors that affect the result. The fundamental problem of long jump, from the biomechanical point of view, is the transformation of horizontal velocity to a resultant of the vertical and horizontal velocities in the take-off phase. It is very important that the athlete realises the greatest possible vertical velocity with the smallest possible loss of horizontal velocity. The jumping distance is defined, according to the theoretical model after Ballreich and Bruggemann, [1], by the take-off distance L1, flight distance L2 and landing distance L3. The CM flight parabola is defined by the following parameters: relative height of CM at take-off, resultant of the vertical and horizontal velocity of take-off, take-off angle and air resistance [1, 5, 6, 7]. Most of the biomechanical studies of long jump technique till now dealt with studying the kinematic characteristics with high-frequency film or video cameras. However, there are very few studies on top long jumpers with emphasis on the dynamic characteristics of take-off, which is the most important generator of the long jump result. The main purpose of our study was therefore a complex analysis of both the kinematic model of long jump and the dynamic model of take-off.
Methods and procedures
KINEMATIC MODEL
The analysis was performed on two jumps of one of the world’s best long jumpers G.C. (GC—body height 178.5 cm, body mass 69 kg, age 24 years, personal best 8.40 m). The length of the first analysed jump was 7.93 m and the second 8.25 m.
Kinematic parameters were obtained with a 3-D kinematic system ARIEL (Ariel Dynamics Inc., USA) with four synchronised cameras (Sony—DVCAM DSR 300 PK), shooting at 100 Hz. The first two cameras, set a 90° angle to the filmed object, were used to analyse the last two strides of the approach and the take-off, with the other two the flight and landing (Figure 1). In the kinematic analysis, a 15-segment model was digitised. The model segments represent parts of the body, connected with point joints. The masses and centres of gravity of the segments and the common body centre of gravity (CM) were computed according to the anthropometric model of Dempster. All kinematic parameters were filtered with a seventh-level Butterworth filter.
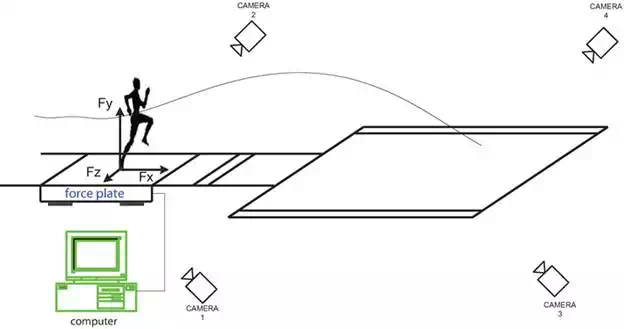
FIGURE 1.
Measurement system for kinematic and dynamic parameters of the take-off in long jump.
DYNAMIC MODEL
The dynamic parameters of take-off were registered with a force-platform Kistler 9287, area 900 × 600 mm, covered with a tartan surface and installed before the take-off board on the approach track of long jump. Forces were measured in three directions: X—horizontal, Y—vertical and Z—lateral (Figure 2).
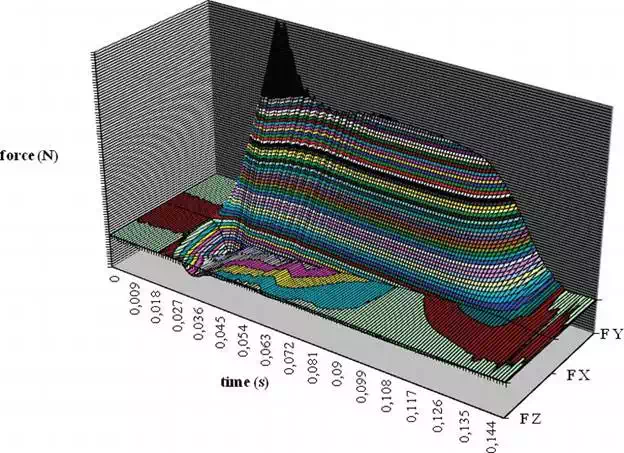
FIGURE 2.
Take-off phase 3D-surface contour plot.
The jump length (L) was measured from the front impression of the foot of the take-off leg on the force-platform to the point of contact of the feet in the sand of the landing pit. The programme package Matlab (Mathworks Inc., USA) was used to analyse the measured forces. The registration frequency on the force-platform was 2000 Hz.
OPTIMISING ANGLE OF PROJECTION AT TAKE-OFF ACTION
We ask ourselves how to determine the best angle of projection at take-off for long jumpers. In our case, we model jumpers as mass points and observe their trajectories for a case where there is no air friction. We already know that energy losses have to be taken into consideration because jumper always loses some energy in a take-off phase, when he/she is transforming his/her horizontal velocity before he/she jumps into combination of horizontal and vertical velocity.
Let us first
look at the example when height of centre of mass at take-off and height of
centre of mass when he/she first touches the ground are the same. Let us denote
velocity before jump with ![]() and velocity after take-off with
and velocity after take-off with ![]() . Angle of projection
shall be denoted with ϕ and jumpers mass with
. Angle of projection
shall be denoted with ϕ and jumpers mass with ![]() . All mechanical energy
before take-off is
. All mechanical energy
before take-off is ![]() . This is jumpers kinetic energy. δ
. This is jumpers kinetic energy. δ![]() denotes the amount of energy that is lost at the time of
take-off as heat and sound [16], and of energy before take-off transforms into vertical
kinetic energy. We denote this part as Δ
denotes the amount of energy that is lost at the time of
take-off as heat and sound [16], and of energy before take-off transforms into vertical
kinetic energy. We denote this part as Δ![]() . We can therefore
write:
. We can therefore
write:
![]()
which means

From this we get

The length of a jump of a mass point, which in our case is the centre of mass, is
![]()
Where

To find the
optimal value of ϕ, we need to find the extreme of function ![]() We do so by finding the zeros of the first derivate of function
We do so by finding the zeros of the first derivate of function
![]()
![]()
We must also take a look at the second derivate to establish if angle that we compute is maximum or minimum

Zeros of
this function coincide with zeros of ![]() . From this equation we
get the optimal angle of projection
. From this equation we
get the optimal angle of projection

With this we
have established that optimal angle is independent of values ![]() and
and ![]() The fact
The fact ![]() also holds true, which brings us to the conclusion that
also holds true, which brings us to the conclusion that ![]() in fact is the optimal angle for longest jump, that is, is the maximum
of function
in fact is the optimal angle for longest jump, that is, is the maximum
of function ![]()
Of course
height of the centre of mass of the jumper at take-off is bigger than the
height of the centre of mass when the jumper first touches the ground because
he/she pulls his/her legs closer to their bodies when landing (Figure 2—kinematic
and biodynamic model of the long jump technique). In this case, the length of
the jump is defined as ![]() , where point
, where point ![]() is defined as an intersection of curves:
is defined as an intersection of curves:

and ![]() , where
, where ![]() denotes the height difference of centre of mass before and
after the jump. Computing this intersection gives us
denotes the height difference of centre of mass before and
after the jump. Computing this intersection gives us

which means

Taking into
consideration that ![]() and
and ![]() we get
we get

In the same
way, as we did before, we can compute the maximum value of function ![]() by finding the zeros of the function
by finding the zeros of the function ![]() . With a lot of algebra and using Wolfram alpha we can show that
. With a lot of algebra and using Wolfram alpha we can show that

In
McFarland’s research [10], ![]() is estimated to be 0.1.
is estimated to be 0.1.
Main body
KINEMATIC ANALYSIS
Take-off is one of the key generators of a successful long jump. The take-off model is defined by kinematic (Table 1 and Figure 3) and dynamic parameters. These are interrelated, in accordance with biomechanical laws. In this phase, the jumper must optimally transform the horizontal velocity developed in the approach into speed of take-off.
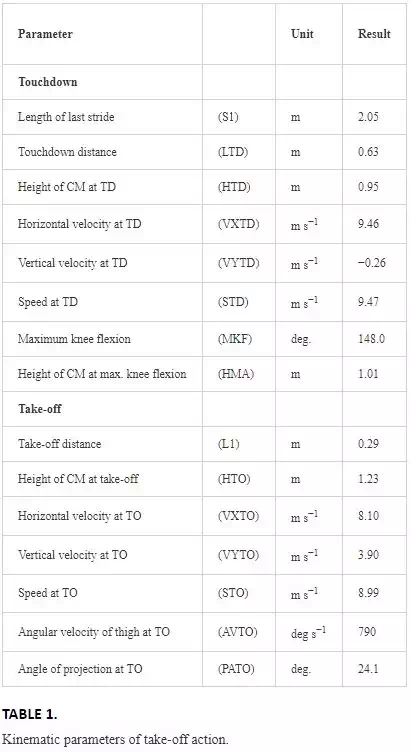
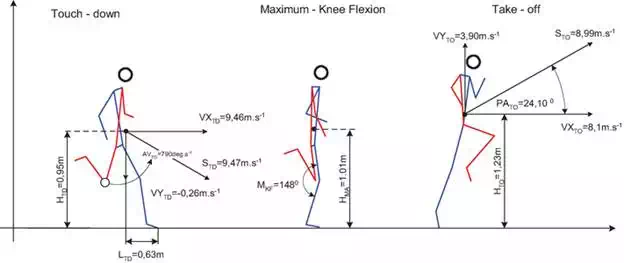
FIGURE 3.
Kinematic model of take-off (G.C., distance 8.25 m).
The take-off speed is the resultant of horizontal velocity at TO and vertical velocity at TO and is one of the most important predictors of an effective jump length. Hay et al., Nixdorf and Bruggemann, found that the correlation between the take-off speed and end result is between 0.74 and 0.83. Horizontal velocity at TD for the athlete GC is 9.46 m s−1. In take-off (TD-TO), a reduction of the horizontal velocity of 1.36 m s−1 occurs, representing 14.3%. Its decrease is connected with the increase of vertical velocity at TO, amounting to 3.90 m s−1 (Figure 3). We can conclude that the loss in horizontal velocity is proportional to the increase in vertical velocity. The vertical velocity at touchdown is directed downwards and has a negative sign (VYTD = −0.26 m s−1).
The realisation of vertical velocity is directly connected with the magnitude of the projection of CM on the surface at touchdown (touchdown distance = 0.63 m). One of the key biomechanical problems of take-off is how to ensure the greatest possible vertical velocity, while keeping the decrease in horizontal velocity to a minimum. The ratio of the take-off velocity components VXTO:VYTO for the athlete GC is 2.08:1. The results of some similar studies show us that this athlete has an optimal vertical velocity at take-off and a horizontal velocity (VXTO) that is a little too low to allow even longer jumps. The consequence of a relatively high vertical velocity at take-off is also the magnitude of the angle of projection at take-off PATO = 24.10 deg. This magnitude of the angle of projection at take-off later defines the CM parabola of the jumper.
The realisation of a high vertical velocity can be connected with an efficient elevation of CM at take-off. The difference between the lowest position of CM at touchdown and at take-off is 28 cm. This is augmented also with a favourable ratio between the length of the last two strides (2.35 m:2.05 m) and the lowering of CM for 11 cm in the last-but-one stride. The average lowering of CM of the finalists of the 1997 World Championship in Athens was 8 cm. This lowering of CM in the last stride but one increases the vertical acceleration distance in the take-off phase.
A very important factor contributing to the take-off efficiency is the angular velocity of the swing leg (AGTO), 790 deg s−1 for the athlete GC. This velocity is not constant, it changes. It is highest in the middle part of the swing amplitude, the lowest at the end of the swing, when the movement of the swing leg is blocked. The consequence of this is the transfer of the force of the mass inertia of this segment (the leg represents, according to the anthropometric model of Dempster, 16.1% of the entire body mass) to the common body centre of gravity of the jumper. Hay et al. states that the contribution of the swing leg to the entire take-off impulse is between 17 and 20%.
Combining this information with the measured data:
![]() ,
, ![]() ,
, ![]() , and
, and ![]() we can compute
we can compute ![]() and
and ![]() while the measured distance of the jump was
while the measured distance of the jump was ![]() .
.
Because, we
have all the needed data, it is interesting to see how initial velocity before
the take-off ![]() affects the optimal angle of projection
affects the optimal angle of projection ![]() computed above. The values for initial velocity were chosen from
the interval
computed above. The values for initial velocity were chosen from
the interval ![]() because most elite long jumpers have their initial velocity
from this interval (Figure 4).
because most elite long jumpers have their initial velocity
from this interval (Figure 4).
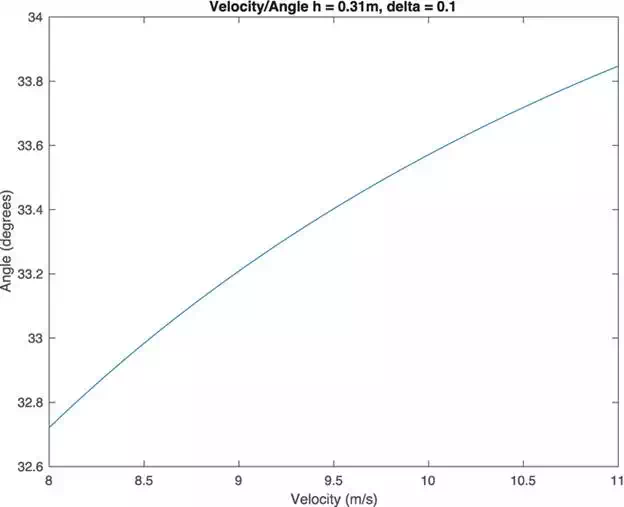
FIGURE 4.
Effect of initial velocity on optimal angle of projection.
Similarly,
we can investigate the relation between coefficient of efficiency ![]() and the length of the
jump (Figure 5).
and the length of the
jump (Figure 5).
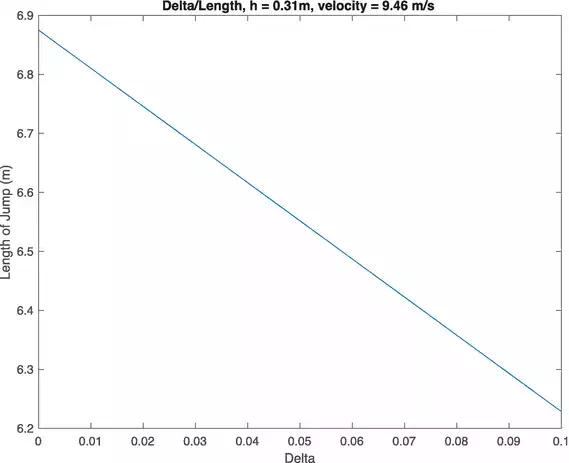
FIGURE 5.
Effect of efficiency coefficient on length of the jump.
Next graph (Figure 6) is in fact actually another graph of correlation between initial velocity before take-off and optimal angle of projection with the difference that this graph shows how the length of jump depends on initial angle of projection for different initial velocities. The optimal angle can be seen as a value of an angle where maximum is achieved.
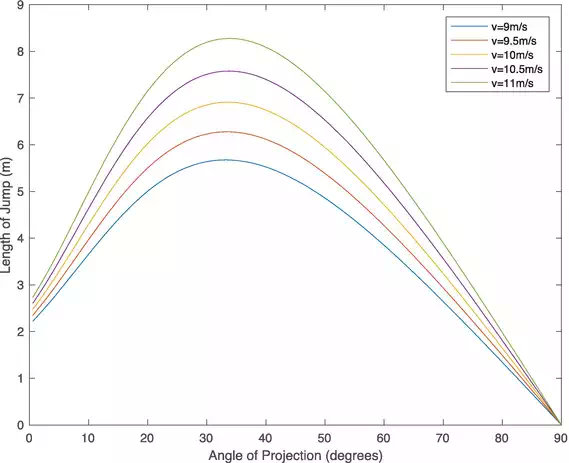
FIGURE 6.
Relation between length of a jump and initial angle of projection.
DYNAMIC ANALYSIS OF TAKE-OFF ACTION
The dynamic parameters of take-off (Table 2 and Figure 7) were measured directly with a force-platform. In this way, we measured the forces developed by the jumper at take-off in a realistic situation, which is a rarity in studies of this kind. The period of the contact phase was 127 ms. Here, the ratio between the period of compression (84 ms) and the period of lift (43 ms) is important—this was 66%:34% for our athlete, which is a good indicator of an efficient take-off , from the point of view of the jump dynamics.
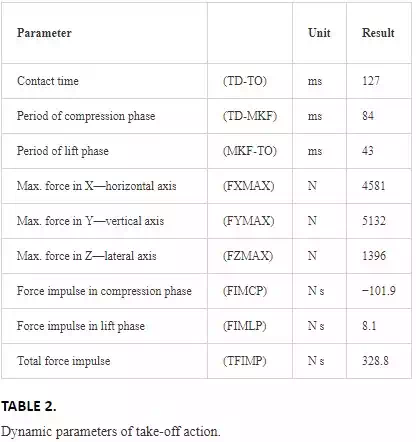
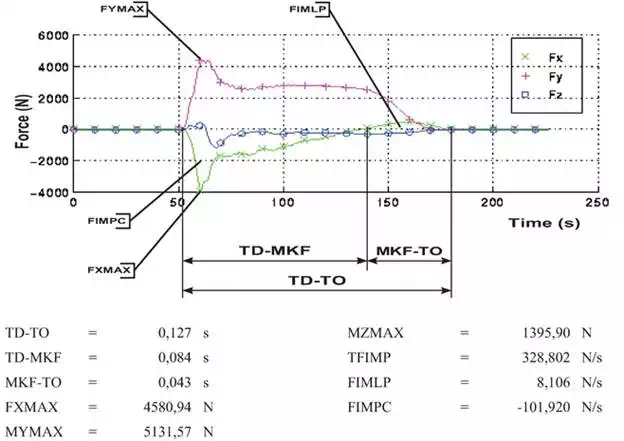
FIGURE 7.
Force diagram of the take-off phase.
The compression phase by definition lasts from the instant the foot of the take-off leg is placed on the ground till the moment of maximal amortisation in the knee of the take-off leg (TD-MKF). The lift phase then follows till take-off (MFK-TO). In the compression phase, our athlete developed a maximal force of 4581 N in the horizontal direction and 5132 N in the vertical direction. The muscular regime is eccentric in the compression phase period and concentric in the lift phase period. The long jump take-off is a typical example of a two-phase eccentric-concentric muscular contraction, whose efficiency depends mainly on two physiological factors. The first in the switching time—the utilisation of the elastic energy potential saved in the muscles, connecting tissue and tendons. This elastic potential is available only for a certain period of time. This time is defined by the life-time of the cross-bridges between the actin and the myosin in the sarcomeres, lasting from 15 to 100 ms. If the concentric contraction does not follow the eccentric one quickly enough, there is no transfer of the elastic energy from the first to the second phase. Studies have shown that elastic energy is the main force generator in the eccentric (compression) phase and chemical energy of the muscles in the concentric (lift) phase. An efficient integration of elastic and chemical energy in the muscles and tendons can cause a 40% greater resultant force.
The second factor of an economic eccentric-concentric contraction is the ability of the muscles to resist rapid extension—stiffness. Stiffness, as a neural mechanism, depends mostly on the pre-activation of the muscles and the action of reflexes: miotatic and Golgi tendon reflex. In light of the biomechanical characteristics, the short-range elastic stiffness is a characteristic for long jump take-off, where it is a matter of an immediate mechanic response of the activated muscle to eccentric contraction. In our experiment, we found the eccentric contraction time to be 84 ms and the athlete develops in this phase a maximal vertical ground reaction force of 5132 N. This force is almost 7.5 times the body mass of the athlete. An important kinematic criterion of the muscles’ efficiency while resisting stretching (lowering of CM) is the angle of flexion in the take-off leg’s knee—MKF = 148 deg. This angle must be sufficiently large. A marked lowering of CM in the MKF phase results in prolonging the compression phase period and through this an inefficient integration of the eccentric and concentric action of the muscles.
The results in the study of Lees et al. show that force impulse in the compression phase is the primary indicator of vertical velocity in the lift phase. A study by Ballreich and Bruggemann namely showed a much higher correlation between vertical velocity of take-off with effective length of the jump (r = 0.89), than with horizontal velocity of take-off (r = 0.21). The force impulse in the compression phase for the athlete GC was −101.9 N s.
NEUROMUSCULAR MECHANISMS OF EXPLOSIVE POWER
In many sport disciplines, power is a major biomotor ability used in the prediction of results. To some extent, other biomotor abilities are also associated with power. It is of little wonder that many kinesiological studies delve into the subject of power, investigating its structure, the training methodology, the application of new methods and diagnostic procedures. In modern kinesiological science, power is undoubtedly one of the most meticulously researched biomotor abilities, yet many questions in this field remain unanswered. The classification of power is based on different criteria. According to the criterion of action, authors distinguish among peak power, explosive power and endurance. Another criterion is that of neuromuscular activity, where power manifests itself in the form of isometric contraction as well as concentric, eccentric or eccentric-concentric contraction. Isometric contraction occurs in conditions where muscular force equals an external force, which is why there is no movement between two points of the muscle. Eccentric contraction occurs in conditions where the external loading is greater than the force of the activated muscles. In real motor situations, an eccentric-concentric muscle contraction is the most common type and manifests itself in take-off power. Take-off power is a special type of explosive power in eccentric-concentric conditions and is most often seen in cyclic, acyclic and combined movement structures. Its main characteristic is the utilisation of elastic energy in the eccentric-concentric cycle of a muscle contraction. The contribution of the elastic properties of the muscle-tendon complex depends on the velocity of the transition. The transition must be as fast as possible and should not exceed an interval of 260 ms. This type of muscle contraction uses less chemical energy to perform mechanical work compared to a concentric contraction alone, thus speeding up the movement. If a concentric phase of contraction follows an eccentric phase quickly enough, the elastic elements release the accumulated energy in kinetic and mechanical work at the beginning of the concentric phase, thereby increasing the muscular force.
The movement structures that occur in specific sport situations are associated with different inputs of eccentric and concentric muscle contractions. Due to the inter-segmentary transmission of energy and the optimisation of the take-off action, the thigh muscles’ activity is important in vertical jumps in conditions of a concentric or eccentric-concentric muscle contraction. With vertical jumps, the muscles engage in the take-off action following the proximal-distal principle of muscle activation. In the first phase of the jump when the vertical velocity of the body’s centre of gravity increases, the extensors of the trunk and hip are the most active muscles. The key role in this phase of the take-off action is played by m. gluteus maximus, which is able to develop great force due to the relatively low angular velocity of the hips. The thigh muscles generate the peak activation at the beginning of the hip extension [4, 6]. Electrical activity in a muscle results from a change in the electrical potential of the muscle membrane. It is measured by means of electrical potential that can be detected on the surface of the skin. For this purpose, surface electrodes are fastened above the muscle whose EMG signal is to be measured. Silver-silverchloride (Ag-AgCl) bipolar surface electrodes are generally used. The skin at the recording site where the electrodes are applied must be carefully prepared, cleansed and treated. Take-off power in conditions where the active muscles first extend (eccentric contraction) and then shorten (concentric contraction) is measured by means of a countermovement vertical jump and a drop jump.
KINEMATIC ANALYSIS OF FLIGHT PHASE
On the basis of the kinematic parameters (Table 3 and Figure 8), we see different contributions of the individual component distances to the final result. For the athlete GC, the flight distance (L2) has the greatest absolute and relative share in the total jump length—88%, then landing distance (L3)—7.7% and the smallest take-off distance (L1)—3.5%. The flight distance is defined as the horizontal distance between the point CM at take-off and the same point at the moment of contact with the sand.
|
Parameter |
|
Unit |
Result |
|
Distance of jump |
(L) |
m |
8.25 |
|
Official distance |
(OD) |
m |
8.10 |
|
Flight distance |
(L2) |
m |
7.33 |
|
Max. height of CM in flight |
(HMF) |
m |
1.88 |
TABLE 3.
Kinematic parameters of the flight phase.
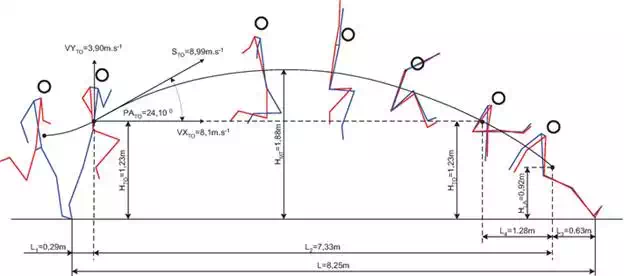
FIGURE 8.
Kinematic model of flight and landing (GC, distance 8.25 m).
The small partial share of the take-off distance of the athlete GC is the consequence of the take-off angle, which amounted to 71.9 deg and the ratio between the vertical (VYTO) and horizontal component of velocity (VXTO) at take-off. The relatively large share of the landing distance (L3) can be ascribed to a very economic technique of landing. In the flight phase, the hang-style long jump is characteristic for the athlete GC, which he utilises very effectively as preparation for landing. A high parabola of CM flight can be seen for this athlete, which is the consequence of a high take-off angle (PATO = 24.1 deg). The highest point of the parabola is 65 cm above the height of CM at take-off. The characteristics of the flight phase are of course also influenced by other factors, especially air resistance, which was not the object of study in this research.
KINEMATIC ANALYSIS OF LANDING PHASE
An economic technique of landing is defined by: landing distance (L3), height of CM at the moment of contact of the feet with the sand (HLA) and landing flight distance (L4)—Table 4 and Figure 8.
|
Parameter |
|
Unit |
Result |
|
Landing distance |
(L3) |
m |
0.63 |
|
Height of CM at landing |
(HLA) |
m |
0.92 |
|
Landing flight distance |
(L4) |
m |
1.28 |
|
Fall-back distance |
(LFB) |
m |
0.15 |
TABLE 4.
Kinematic parameters of landing.
One of the most important variables in landing is the horizontal landing distance, defined by the projection of point CM and the initial contact with the sand minus the distance lost by the athlete by falling backward or otherwise breaking the sand at a point closer to the board than the initial point of contact (LFB). The index of technique’s economy is: IR = L3 − LFB. Hay and Nohara [7] found on a representative sample of 12 best American long jumpers that the average fall-back distance is 11 cm, for our athlete this distance is 15 cm. This leads us to conclude that his technique is economic and efficient. Mendoza [11] also finds that values of landing distance (L3) between 57 and 65 cm point to a very economic landing. The athlete can contribute an important part to the competitive result with good landing technique, with this phase being dependent on specific motor abilities, especially power of the hip flexors and belly muscles; morphologic characteristics, coordinative abilities of the athlete and also the quality of the landing area.
Conclusion
The results of kinematic and dynamic analysis showed that the efficiency of long jump is defined mostly by the following take-off parameters: horizontal velocity at TO, vertical velocity at TO, speed at TO, angle of projection at TO, maximal force X—horizontal and Y—vertical axis, force impulse in compression and lift phase. An important factor of a rational technique of long jump is also the landing, which is defined by the landing distance and fall-back distance. This study was conducted with only one elite long jumper (third place at the Universiade in Fukuoka, third place at the Seville World Athletics Championship) and offers an insight into the dynamic and kinematic parameters required for top results in this athletic discipline. Biomechanical diagnostics highlights the objective parameters of the technique on which the training process must be based. The study results hold both theoretical and practical value in applied biomechanics and sport practice, mainly in terms of selecting the optimal training methods.