Expanding the rotational workspace
CONVENTIONAL METHODS
In this section, methods for expanding the rotational workspace of the parallel robot are introduced. Figure 7(a) represents the Stewart Platform [9], six-dof parallel robot with three-dof translations and three-dof rotations. The moving plate is driven by linear actuator embedded six limbs. Each limb is paired by a passive universal joint (U) with the base plate and paired by a passive spherical joint (S) with the moving plate. The Stewart Platform is categorized into 6UPS parallel mechanism. The Stewart Platform generates high power with a hydraulic linear actuator. Flight simulator and driving simulator for carrying heavy cockpit of aircraft are typical applications of the Stewart Platform. However, the robot has a drawback of small rotation around z axis because of the mechanical interference between the limbs. Figure 7(b) represents a six-dof cable-driven parallel robot. This robot also has the same drawback of small rotation around z axis because of the cable interference. Small rotation of parallel robots puts restriction to their applications.
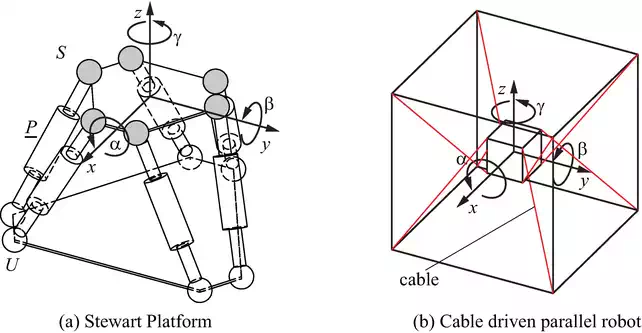
FIGURE 7.
Conventional six-dof parallel robot.
In order to cope with the problem, Clavel invented a novel parallel robot DELTA [11] as shown in Figure 8. The DELTA generates three-dof translation and one-dof rotation around the z-axis.
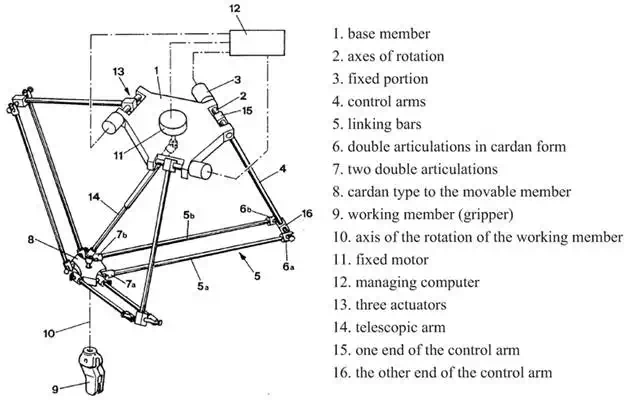
FIGURE 8.
The DELTA robot.
Three control arms are rotated by three motors located on the base plate. Each arm is connected to the moving part by a parallelogram rod with spherical joints. The gripper on the moving part is connected to the motor on the base plate with a telescopic arm via universal joints (Figure 9).

FIGURE 9.
Mechanical gimmicks enlarge the rotational workspace of parallel robot.
Researches on expanding the rotational workspace of the DELTA like parallel robot have been reported from research group at the Montpelier University. The basic idea is to convert the translational motion to the rotational motion by the mechanical gimmicks such as pulley, rack and pinion, and screw. Crank embedded moving part has been proposed by McGill University for two-limb parallel robot and by Fraunhofer IPA for cable-driven parallel robot.
DIFFERENTIAL SCREW DRIVE SYSTEM
Recently, differential screw drive systems composed of two screw-nut pairs of different leads have been applied to robot systems. There are four driving methods of the differential drive systems;
1. Rotations of the two nuts are converted to the rotation and translation of the screw pair, which is coaxially arranged with one end interconnected with each other.
2. Translations of the two nuts are converted to the rotation and translation of the screw pair, which is coaxially arranged with one end interconnected each other.
3. Rotations of the two screws are converted to the rotation and translation of the nut pair, which is coaxially arranged with one end interconnected each other.
4. Translations of the two screws are converted to the rotation and translation of the nut pair, which is coaxially arranged with one end interconnected each other.
In this section, kinematics of the differential drive system (b) as shown in Figure 10 is discussed for enlargement of the rotational workspace of the parallel robot.
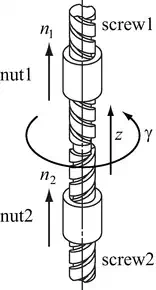
FIGURE 10.
Differential screw drive system (translations of the two nuts).
Letli (i = 1, 2) be the lead of the ith screw nut. ni (i = 1, 2), z, and γ represent the position of the ith nut, position, and angle of the screw pair, respectively. Relation of these parameters is given as
![]()
Equation (20) is given in the matrix form as

Equation (21) gives the inverse kinematics of the differential drive system. The forward kinematics of the system is derived by inverting Eq. (21) as
![]()
If two leads of the screw-nut pair are identical as
![]()
then the matrix in Eq. (22) becomes singular. It is necessary that the leads of the two screw nuts are different from the differential drive system.
Figure 11 represents a 4-dof parallel robot that the differential drive system (a) embedded in the moving part. H represents a passive helical joint composed of screw and nut pair. In Figure 11, two Hpairs have the same lead, but the different helix hands (right and left). In Figure 9 (c), one H pair and one R pair are embedded in the moving part. This is included in the differential drive system (a), one of the H pair has zero lead.
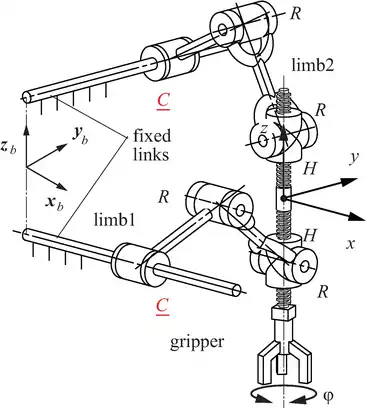
FIGURE 11.
Parallel robot with the differential drive system embedded moving part.
Conclusion and future works
After commercialization of the DALTA robot, a lot of parallel robots can be found in machine factory and other industries. Recently, one can get the kit of a 3D printer machine by linear DELTA mechanism under 500 USD. It may be said that the first-generation parallel robot such as DELTA and Stewart Platform is getting to reach the mature stage. In this chapter, expanding the workspace of the parallel robot was introduced. The translational workspace was expanded by singularity-free mode change using the actuation redundancy. The differential drive mechanism converts the translational motion to the rotational motion, which expands the rotational workspace of the parallel robot. These parallel robots are expected as the next-generation robot.
At the end of this chapter, an example of the next-generation parallel robot is introduced. Figure 12(a)represents a novel two-limb six-dof parallel robot. As shown in Figure 12(b), a differential screw mechanism is embedded in the output link for enlarging the rotational workspace of the gripper. This parallel robot extends its degree of freedom from four (three translations and one rotation as shown in Figure 11) to six (three translations and three rotations) as shown in Figure 13. We are working on the kinematic analysis and detailed mechanical design of the parallel robot.
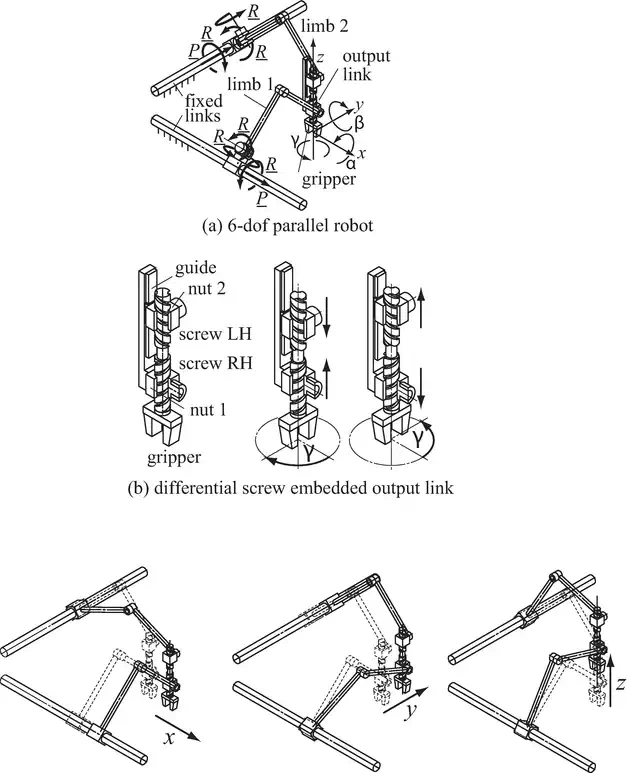
FIGURE 12.
Two-limb six-dof parallel robot with the differential drive embedded output link.
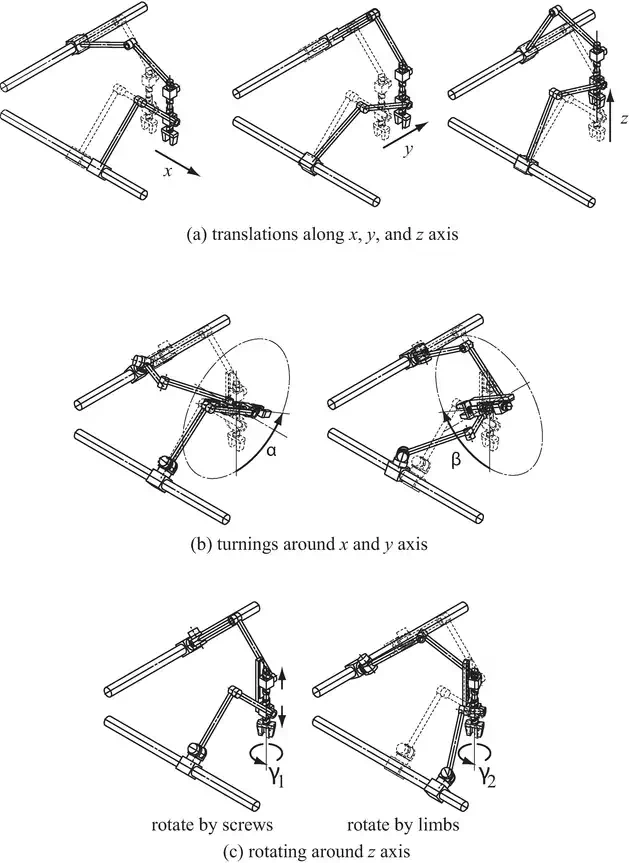
FIGURE 13.
Motion of the two-limb six-dof parallel robot.