Design of Large Diameter Mine Countermeasure Hybrid Power Unmanned Underwater Vehicle.
The naval mine is one of the most cost-effective weapons in the naval arsenal and have many synergetic effects in the maritime warfare. Mines are relatively simple, cheap and can be laid from any type of sea and air platform. Combat effectiveness of naval mines covers from defending important and high-valued targets at sea, ports, and offshore structures to denying hostile forces access to the coastal zone [1]. Mines can quickly stop, or seriously impair surface, submarine forces and amphibious or seaborne attack. Their flexibility and cost-effectiveness make mines attractive to the less powerful belligerent in asymmetric warfare and maritime warfare.
Mines can be used as both offensive, defensive weapons and tools of psychological warfare in rivers, lakes and oceans. As offensive weapons, mine are placed in enemy waters and across important shipping routes to destroy or damage both civilian and military vessels [2]. Defensive minefields protect tactical areas of coast from enemy ships and submarines, or keeping them away from sensitive and high-valued targets. Threats of mines are increasing due to recent technology development, such as autonomous systems and computer systems with artificial intelligent capability. There are many solutions to solve MCM problems so far as difficulties to detect identify and classification. Unmanned systems also cleared the way to sweep and naturalize mine safely without involvement of human beings.
Mine countermeasure (MCM) is a tactical measure to clear or neutralize mine threat. Tactical MCM operations can be preceded with both passive and active operations. Passive MCM relies on minimizing the influence of the ship’s physical signature such as emitted acoustic and magnetic and electric signals to be sensed by mines. Active MCM operations are minesweeping, neutralization and mine hunting, which are trying to sweep or destroy mines. Influence minesweeping uses acoustic, magnetic and pressure signals to detonate targeted mines [1]. Mechanical sweeping uses a towed minesweeping tools to cut the cables of moored mines. After mines are floated to the surface, they are detonated by shooting or explosives.
Mine hunting is getting difficulties in most parts of the littoral regions near enemy territory. Access to these tactically important areas by the sea requires minesweeping or neutralization operations. Keeping the man out of dangerous minefield requires various unmanned autonomous MCM systems as a potential attractive option [3]. Many of developed high technologies that are operated in manned mine warfare operations could be transformed into an effort to develop unmanned and autonomous MCM vehicle systems.
Unmanned systems integrated with emerging technologies are the minesweepers and hunters of the future MCM operations. A focused technology effort is needed to incorporate unmanned systems into the mine countermeasure ship and other related MCM fleet forces. It is time to press ahead with establishing fleet requirements for unmanned MCM systems that lead to programming decisions allowing mine hunting and minesweeping missions to be performed without a man onboard, eliminating the risk to personnel.
The physical and operational capacity of small displacement UUVs will greatly limit what UUVs can provide as multimission assets and effective autonomy at a real combat situation. New platform designs that are true viable organized intelligent assets should be incorporated with large diameter UUVs [4]. Realization of the full potential of UUV system as a truly autonomous undersea vehicle (AUV) in MCM warfare will have sufficient energy system for super long combat endurance and intelligent mission management capability and mine disposal weapons.
Since current technology is available to deactivate or eliminate mines, an effort to make a larger and heavier UUV system should be discussed, in order to produce an unmanned system to integrate complete MCM UUV systems. With a larger diameter UUV system, however, there are still problems with vehicle’s operation time and speed at sea, vehicle and mission management systems with appropriate hardware configurations. Larger displacement UUVs must be integrated into a new platform design so that they can be a viable organic asset. Realization of the full potential of the UUV as a truly autonomous undersea vehicle (AUV) in warfare will begin with a transition to a large displacement vehicle.
We investigate strategy and threat of mine warfare and recommend optimal concepts of operation of their mine countermeasure operation of future maritime warfare. In this chapter, we provide CONOPs developments of future large diameter MCM UUV in Section 2, specifications of the MCM UUV system configurations in Section 3, system effectiveness discussions in Section 4, and the conclusion in Section 5.
Concepts of operation establishment of mine countermeasure UUV
IMPORTANCE OF INFORMATION, SURVEILLANCE AND RECONNAISSANCE (ISR)
The intelligence, surveillance and reconnaissance (ISR) aspects of mine warfare are of particular importance, since that is where mine warfare really starts, regardless of the specific purposes for using this collected information. As with most complex military operations, mine warfare operations are inherently joint operation between theater forces. The tactical commands from theater headquarters actually operate the mine warfare forces in theater. The intelligence agencies provide vital ISR information [5], and Marine Corps units must work closely with the navy in any amphibious operations, as well as interface with army mine warfare in addition to other operations ashore. Navy and Coast guard units must work together closely in inshore mine warfare operations to secure good communication.
Battlefield reconnaissance data are essential for both safe far- and near-shore operations. Mine warfare is the strategic, operational and tactical use of sea mines, and the countermeasures to defeat them [6]. Undersea physical characteristics, ocean climate variations and environment are considered before an operation is initiated. Ocean environmental characteristics are very important to determine where mines should be placed and how many and how to deliver the mine to the position. Oceanographic parameters have greatest impact on mine warfare operations and need the most enhanced predictive modeling capabilities for a wide range of oceanic processes. They will greatly enhance the war fighter’s ability to turn vast amounts of oceanographic information into knowledge, which is used to control battlefield operations [7]. Major physical oceanographic data for the mine warfare consist of current patterns, salinity, temperature, bottom status and clarity of water of the area [8].
Bathymetry forms the boundary condition for all fluid motions and can extend beyond the local region. Ocean currents are long-time-scale fluid flows arising from a wide variety of processes, such as direct wind forcing and tides. The complexities of forces driving current flow require to work together with meteorological and oceanographic analysis. They also determine how these forces are interacting with each other, understand the time scale of variability driving current flow and understand how this may affect the mission [5].
Mine laying and mine countermeasure operations are parts of the main subsystem of mine warfare operations [6]. Better priority weight should be given to the technical exploitation of threat mines, mine warfare indications and warning (I&W) tasking. There are several points of consideration in mine warfare at the combat zone or landing assault area. Thus, currently, both near-term and long-term mine reconnaissance systems (NMRS and LMRS) are developed to expand organic and dedicated MCM capabilities. The MCM command center should disseminate them at all command levels and provide rules of engagement (ROE) to counter hostile miners and relevant environmental databases, such as the mine warfare environmental decision aids library (MEDAL) and the contingency planning tool [2].
COMMUNICATION AND CONTROL (C2) IN MCM OPERATIONS
Naval ISR group is collecting and processing any potential data and information in order to develop optimized mine detection procedure and clearance capabilities, organic to carrier and surface battle groups (CV). With those ISR information and operational procedures, naval forces can identify, avoid or neutralize mines within tactically acceptable time limit and with minimum operational risk [9]. On-scene MCM capabilities, through introduction of organic capabilities into all carrier battle group (CVBGs) and surface battle groups, would be completed with completion of MCM communication and control network systems.
Major MIW capabilities include intelligence collection and surveillance, notification of imminent mining, interdiction, postinterdiction intelligence evaluation and dissemination and passive MCM threat awareness and signature control. With wide dissemination and availability of the battle space information, the MCM control center has to communicate frequently as the real-time development changes so far.
Communication systems related to the mission operations are data communication links where tactical maneuvering information on MCM missions is exchanged. Each division on communication links is evaluated through communication quality of data, security and interoperability. As organized supporting systems, and command, control, communications, computers, intelligence (C4I) are introduced into the naval forces. Effective C4I systems must allow MCM functions to be performed from variety of platforms with highly dynamic environment. Database systems for mine identifications will include such features as high-resolution environmental mapping data and explicit simulations. It can be used for doing detailed operational planning, training and rehearsing [8].
In the future MCM operations, the decision-making software, and combat information display systems will be driven by data from extensive multi-source collections. The C4I architecture will be networked to ensure the existence of communication paths between platform and detachment despite uncertain point-to-point links. Shared awareness of combat scene information, such as analysis efforts, off-board forecasts and historical environmental database, is critical, robust, real time and cooperated. With all these doctrinal evolvements, up to dated technologies, hardware (H/W) with appropriate operating software (S/W) should be accompanied for smart and safe MCM operations in the future [2]. Fundamental issues for evaluating communication systems for MCM are bandwidth, range, covertness and required infrastructure [3]. The combined C4I system architecture will be central for the coordinated and multiplatform operations.
MINE HUNTING, SWEEPING AND NEUTRALIZATION [10]
In the MCM operations, there is many data sensed and produced to detect, identify, classify mines and start sweeping and neutralization operations. Active countermeasures are ways to clear a path through a minefield or remove it completely. This is one of the most important tasks of any MCM fleets and task forces. Minesweeping is either a contact sweep, a wire dragged through the water by one or two ships to cut the mooring wire of floating mines, or a distance sweep that mimics a ship to detonate the mines.
Mine hunting is different concepts and operations from minesweeping, although some mine hunters can do both operations. Mines are hunted using sonar, side scan sonar or synthetic aperture sonar, then inspected, classified and destroyed either by remote controlled or by divers unmanned vehicle systems. Mine hunting started as mine was used, but it was only after the Second World War that it became truly effective [11].
A more drastic MCM method is mine breaking which is simply to load a cargo ship with cargo that makes her less vulnerable to sinking and drive her through the minefield, letting the ship to be protected follow the same path. An updated form of mine breaking is application of small unmanned systems that simulate the acoustic and magnetic signatures of larger ships and are built to neutralize mines. In future, more autonomous unmanned systems are involved in every step of minesweeping and neutralization operations due to safety of human beings and effectiveness of MCM operations. Applications of RF and laser optic technology are considered as potential alternative methods of efficient underwater communication systems [3].
DATA PROCESSING AND DECISION MAKING AI LOGIC SYSTEM
All data processing in intelligent MCM operations is carried through a systematic data fusion approach. AI machine learning and perception, feature extraction via real-time image or intelligent navigation and mine-clearing operation sequences are integrated with mission management processes. Main control center will support and coordinate automatic classification of mines and other ordnance, as well as intelligence obstacle avoidance navigations using data from navigation sensors. The image and pattern identification-processing techniques, which have been adapted from video image and sensor signal, focus on classification of mines by the recovery of explicit feature-based descriptions of man-made objects [12]. Silhouette descriptions and classification are used to support the dynamic view positioning and automatic object classification.
The algorithmic partitioning in a front-end digital signal processing (DSP) dedicates image acquisition, dynamic range equalization, image segmentation and region-of-interest identification [13]. The parallel processing engine supporting applications of a statistical evaluation of linearity or regular curvature have gradient extraction, edge thinning and threshold algorithms [14]. All the data from traditional navy data base, mine warfare environmental decision aid library (MEDAL) systems on MIW, MCM and tactical oceanography also could be accessed in main processing unit in the MCM UUV system and fed into the identification and classification processors [15]. A typical MCM data-processing flow of MCM UUV systems is shown in Figure 1.
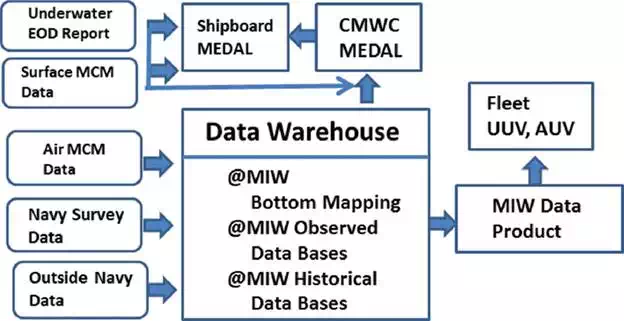
FIGURE 1.
Mine warfare environmental data flow.
Reacquisition and relocalization of predesignated mine or mine fields need huge amount of signal, communications and data packages from various sensor systems. Data sets for reconstructing three-dimensional (3D) and two-dimensional (2D) modeling are very big and very difficult to transfer through current acoustic carrier in underwater environments [5]. Some other information comes from distance oriented and directional angle of illumination of light source, which gives some incentive in the reconstruction of 3D or 2D model of mines.
Identification, reconfirmation of mines and mine-like objects (MLO) classifications are critical factors for mine disposal operations. Efficient and different bandwidth characteristics of communication careers are critically needed at the main control center of MCM operations to gain access to high-quality mine detection sensor data from a remote area, due to the lack of computational capabilities of the existing sensor data-processing systems [16, 17].
MISSION MANAGEMENT SYSTEM
If the duration of MCM operations at sea is expanded to more than 50 days, it is necessary to maintain the clandestine nature of the MCM operation at enemy littoral zone; therefore, in these cases, mission management is critical to autonomous MCM operations. With the introduction of system autonomy of mission goals, which is a relatively new area of research, this system will retain clandestine operations and power system requirements for functionality [18]. Coordinated MCM mission management systems optimize available sensors and systems, regardless of the host platform, to ensure that the most effective is used when and where it is most needed.
Fundamentals to the MCM operational concept are to locate minefields, identify no-mine areas accurately and clear mines efficiently as soon as possible [19]. This area focuses primarily on unmanned autonomous vehicles intelligence since these often have the greatest redundancy, and because they have the most intricate machine-readable, autonomous mission plans. Models of the vehicle including their planning/control systems, and operating environment can be linked together to form an assessment tool [16]. This tool helps to verify interface compatibility and basic functionalities, as well as to facilitate exploration of control options and evaluation of potential benefits.
The mission control data, which are required to define current mission objective, the vehicle’s dynamic characteristics and the environmental data are collected from external sensors and provided by the user, as they are specific to the effective MCM operations. The autonomous mission-planning algorithm translates the mission requirements into a mission plan, a set of constraints and execution sequences. An integrated mission planner and power management algorithm would combine to this intelligent system with motion and power control subsystem [10].
MCM mission management configuration [17] of MCM UUV consists of degrees of perception, intelligent control and management to define sense-plan-act or sense-react behavior doctrine. Functional limitations of vehicle sensor systems imposed by the combat environment require alternative course of vehicle control, which defined mission goals to be factored in the control system appropriately. A common approach to mission implementation process is to develop functions, which are grouped and sequenced to perform overall tasks through artificial intelligent (AI) expert system architecture [12].
It is based on a traditional perception-action loop, allows low-level sensor signal processing and does feature extraction to assist mine classification, MCM mission planner and vehicle control system. MCM UUV mission management system focuses on mine classification and dynamic repositioning, which optimizes the aspect relative to the designated mine target and clearing mine. Obstacle avoidance navigations require relatively sparse sensor data in the dynamic construction of world models for environment [12]. In the main control block, the perception/classification processor is combining with dynamical position sensors via a highly maneuverable platform. MCM expert system has the capability to perceive the object of interest from multiple perspectives, which then increases the probability of classification for the mine targets. A key concept in data fusions of expert system includes the employment of heuristic knowledge, which incorporates constraint knowledge associated with target characteristics, environment and attitude of vehicle.
This provides basis for interaction with the object of interest, and dynamic perceptions that provide active sensor management and vehicle path planning in the navigation and guidance [16]. A second unique aspect of the AI expert system architecture is the implementation of sensing, evaluation and action encapsulated as subordinate tasks under the integrated mission control system. It optimizes machine-generated direction of task-organized approach and initiates signal for the course of action [6]. The MCM AI expert system architecture and its relationships between the executors, and the data/signal processing are shown in Figure 2.
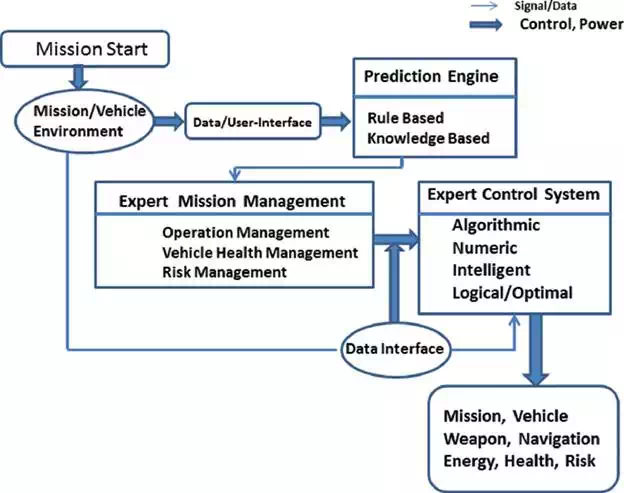
FIGURE 2.
Operations of MCM mission management expert system.
VEHICLE MANAGEMENT SYSTEM
The system capability of precise navigation and operational data collection is critical to ensure safe navigation of the vehicle and in the achievement of system objectives. To resolve the vehicle position at the submeter level, a compact low-power solid state inertial measurement unit (IMU) has been incorporated [20]. This unit measures the change of 3D velocity, angular velocity and temperature as well as performs corrections of thermally induced drift. The IMU is augmented by a compact Doppler Sonar System using the Kalman filter or other processing techniques. A precise navigational compass and clinometers provide heading information and navigation frame correction data for noises [21].
Simultaneous localization and mapping (SLAM) techniques [22] are utilized as a navigational tool and are adapted for reconfirmation of designated mine localizations with autonomous navigation for obstacle avoidance to a safe margin. All the information are filtered and processed in a data processing and distribution unit and distributed for navigation, SLAM processing and mine neutralization procedures. With updated environmental 3D map and obstacle information, the MCM UUV navigation system can be guided and controlled within guided optimal paths to the targets with a degree of accuracy [22].
OPERATIONAL ENDURANCE AND AVAILABLE POWER SYSTEM ALTERNATIVES
System endurance in unmanned underwater vehicle (UUV) operations consists of available total energy sources, vehicle system objectives, maneuvering path plan and design parameter characteristics. In general, the more the endurance is desired for UUV operations, the more the coordinated efforts are required during the vehicle design stage regarding the structural design, energy systems and power management. UUV endurance with respect to UUV system activities is characterized by range of missions, operation time and kinds of energy systems and is controlled by the capacity of on-board energy, hull structure of the vehicle, optimal propulsion and energy management system [23]. Until now days, these properties were investigated separately with system endurance as an individual component. In this study, we integrate all these components and make overall suggestions to the system endurance with respect to hull shape, power systems, propulsion efficiencies and respective activities of missions.
ENERGY SOURCES FOR MCM UUVS
Power system considerations dominate the design of UUVs, due to the fact that usually the energy source is the most limiting factor for mission operations of autonomous vehicles. The energy system of UUVs has been a major issue due to its impact on the ultimate performance and extension of UUV missions [24]. There are strong desires to minimize the size, cost and energy consumption rate for all aspects of UUV operations. In the operation of unmanned vehicles, missions with high speed and longer endurance, such as mine countermeasure (MCM), antisubmarine warfare (ASW), and intelligence, surveillance, and reconnaissance (ISR), need more powerful and sophisticated energy systems, such as fuel cells and hybrid systems in addition to battery power [23].
Since the power required to propel an underwater vehicle is roughly proportional to its surface area, and cubic of forward velocity, the stored energy capacity is proportional to its volume, the mission duration or range achievable at a given velocity varies directly with vehicles. The information of the UUV energy source gained via analysis of the batteries, fuel cells, internal combustion engines or other available energy sources is found in Jane’s Underwater Technology Information. Important UUV power system performance metrics consist of energy and power, specific energy and power, usable state of charge, voltage response under load, calendar life and charge acceptance specifically, power and energy density and physical volume are critical to UUV system design. Figure 3 [24] shows the specific power and energy properties of major UUV energy sources.
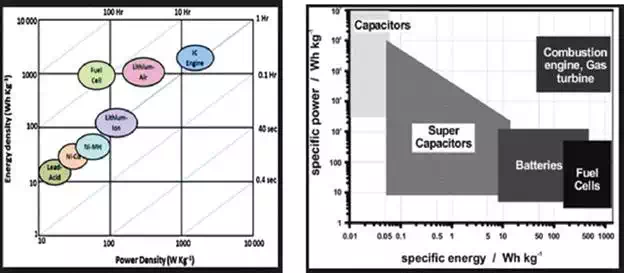
FIGURE 3.
Energy source characteristics, Ragone Chart [24].
Based on current technology development of battery systems, high-performance battery is the most favorable choice for the autonomous vehicles based on performance, availability and cost-effectiveness. With battery applications, to facilitate the addition of battery packs to the vehicle, the hull shape should be redesigned to be longer or wider. Such hull reshaping reduces the overall vehicle drag coefficient and increases energy to UUV’s propulsion power. As UUV energy systems are characterized by specific energy or power density per unit volume or weight, adding additional energy to the system increases the vehicle length [23]. When the battery packs are added, the midsection (D) must be longer (L) in order to house additional battery packs. This changes the aspect ratio, and increases the vehicle drag coefficient. Increased vehicle drag requires more propulsion power, which is a portion of added energy. The sensitivity to added battery packs is compensated for by changing the axial drag coefficients as and other conditions, including hotel loads, are unchanged.
Based on the Ragone Chart characteristics [23], the preferred long-term approach to using hydrogen is the fuel cell. Fuel cells use a process that is essentially the reverse of electrolysis to combine hydrogen and oxygen in the presence of a catalyst to generate electricity. Fuel cells are much more efficient than ICEs often topping 70% [24, 25]. The main problem with fuel cells is the cost, and the other primary issue with fuel cells is durability. Both of these renewable fuels have lower heating values (Btu/gallon) than their counterpart gasoline and diesel fuel, resulting in higher fuel consumption when measured on a volume basis. Diesel engine offer better fuel savings over gasoline engines, battery and fuel cells on specific energy containment and gives good gas mileage on fuel consumption (gallon/mile) and load-specific fuel consumption (gallon per ton-moles), defending on the engines and operating conditions, diesel engine can provide up to 25% lower fuel consumption than gasoline engines.
Considering more than 50 days of field operation of MCM UUV and current technology development of battery systems, it could be a realistic combination for larger diameter long endurance MCM UUV system with diesel internal combustion engine (ICE) and effective battery systems. Internal combustion system gives relatively high specific power and is proven as a convenient technology, whereas battery systems give operational conveniences. We tried to integrate a small diesel engine connected to battery system, as well as to modify the hull of the UUV for a snorkeling operation [25]. This is for both recharging and the propulsion of the MCM UUV. This diesel battery hybrid power system is designed to be controlled by vehicle management computers and the main AI expert mission management system. In this power option, we consider appropriate snorkeling systems and structural accommodations.
CONOPS OF HYBRID MINE COUNTERMEASURE UUV
The main concept of MCM operations using UUV systems is to reduce incoming threats for the naval fleet with the employment of a robust, highly autonomous vehicle unit which is capable of operation engagement and execution of neutralization procedures. Neutralization procedures include either moving the mine out of the original place, precise delivery of the charged device to a desired location or the acquirement of projectiles to blast previously localized, in volume, drift, floating and bottom mines in deep and shallow water zones [15, 16].
The main body of the new MCM UUV has fully trained AI expert systems with MCM data bases to implement mission movement, in addition to vehicle and contingency operational management. The MCM UUV system has expandable small UUV sensor/neutralizers with a formed charge, and it is able to acquire projectile reaching and explode designated mines. Before it begins actual disposal activities, the control module of UUV unit requests a confirmation of mine identification to the mother ship via acoustic and RF communication links [8].
In the envisioned concept of operations, a UUV unit uses its high capacity communication links to get prior mine target information from the MCM operation center at the mother ship which is located more than 50 miles standoff distance [6] at high sea as shown in Figure 4. The vehicle then initiates an adaptive engagement plan autonomously along its trajectory with the available information from the navigation sensors. While compensating for winds, waves and currents along the disposal range, it will try to navigate accurately to the designated mine target. All the way to the designated mine position, the launched disposal device maintains the targets in the field of the imaging sonar. After neutralizing the designated mine, the UUV unit performs a neutralization damage assessment, and reports that the mission has been accomplished [18].
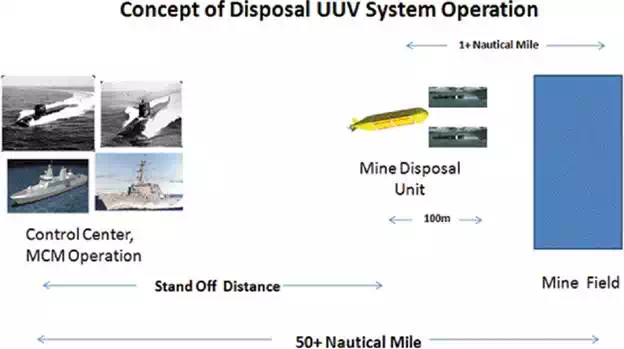
FIGURE 4.
Concept of MCM UUV system operations.
System design of a large diameter MCM UUV unit
Current status of unmanned system technology and participation of unmanned vehicle fleets to naval operations can transform the concepts of future navy MCM tactics, weapons, and man machine interoperability in the field. In the near future, MCM vessels with C4I capability and MIW data base that act a main control center for a variety of unmanned vehicles in the enemy territory and doing a MCM operations without the presence of men in the mine field [9].
LARGE DIAMETER UUV [16]
The conventional smaller diameter unmanned vehicle system has major operational difficulties in sensor system and vehicle endurance that give limited search, launch and recovery operations. If we can design larger unmanned vehicle, we will have more payload and energy storage for longer endurance. They can be a force multiplier for increasing the operational capability of submarines and surface ships [7].
The options for hull shape and various subsystem configuration of vehicle define the set of vehicle design options which are evaluated by the design requirements. Some important design options are the fineness ratio and block coefficient, which dictate the basic packaging spaces and sizing of all other vehicle subsystems [12].
MAIN CONTROL CENTER CONFIGURATIONS
The autonomy of the system and the spectrum of operations are fundamental characteristics on MCM operations. The main platform has mission management blocks that automatically perform various MCM operational procedures such as contact of mines, obstacles from multiple sensor data sources and management of neutralization process, environmental data and bottom mapping [17]. For the mission accomplishment, organic MCM platforms, and operation with various sensors must undergo guidance of system management command, which is from rigorous analysis, experimentation, modeling and simulation on board [18]. The missions of MCM fleet operation is divided into five segments; launch, transit, execution of mission, return transit and recovery, each defined by key mission, and environmental parameters such as range, speed, ocean current and salinity and various MCM mission-related execution orders [12].
Advanced technologies applied for MCM main mission management system include situational reactive mission control suits, smart sensor system of systems, dynamic intelligent mine classification processors with MCM data bases. Vehicle management system controls precise intelligent undersea navigation, intelligent sensor systems and obstacle avoidance measures. Application of up to date AI technologies to the vehicle’s functionality and mission effectiveness of MCM UUV system are implemented with expert system blocks, AI pattern classification and efficient power management systems in our works [12]. The MCM UUV unit provides autonomy of vehicle systems through incorporation with platform-independent autonomous controller that supports high degree of autonomy, highly precise low-power navigation and machine vision in support of automatic classification [26]. Mission management function block diagram of MCM UUV is given in Figure 5.
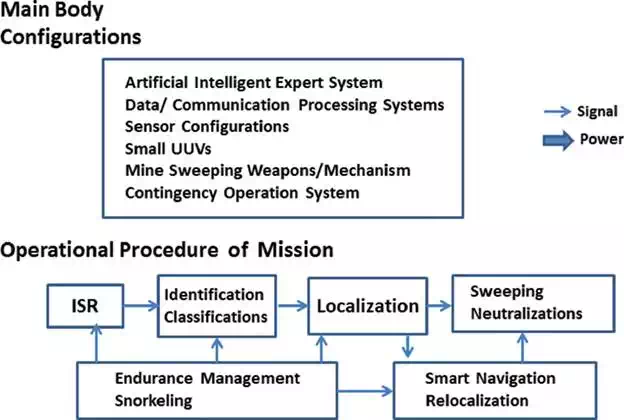
FIGURE 5.
Function diagram of AI mission management system.
A capability of directing all aspects of the multifaceted MIW campaign plan is needed to bring the various MCM capabilities together, providing unity of effort in defeating the mine threat.
NEUTRALIZATION WEAPON
There are several state-of-the-art weapon systems to dispose or detonate mines effectively, and economically such as the use of a laser gun, acquire gun and small charge delivery devices. Furthermore, the confidence for job completion requires the capability of accurate battle damage assessment (BDA). Underwater motion projectile is multipurpose in formed cavity water, due to its density, has a profound impact upon the terminal velocity of the implant at the target. A suitable weapon technology applied to MCM UUV is a lightweight composite 30 mm launcher that would implant a round filled with either high explosives (HE) for an explosive hard-kill or reactive material for a soft kill burn [3].
Similar technology was developed to counter roadside improvised explosive devices using 50 caliber weapons. A 30 mm implant would be usefully larger and could integrate a compliant fusing device, utilizing a detonator enables digital fusing, and affords either timed or controlled detonation, including detonation by an acoustically transmitted command. A 30 mm launcher provides sufficient terminal velocity to penetrate 5/10 inch cold rolled steel from a range of 30 feet [13, 26].
The currently achieved standoff range of 30 feet which the UUV should shot detonate the mine is not sufficient to ensure safety of MCM UUVs. Shooting from longer ranges requires significant basic research, and development, both in material strengths, and in achieving precise sonar fire-control accuracies before truly safe standoff ranges are achievable.
ENERGY AND POWER MANAGING SECTION
Considering the operational combat field endurance limit of more than 50 days of MCM UUV and the current status of the battery systems technology, the combination of diesel internal combustion engine (ICE) and effective battery systems could become reality. The high specific power generation of the internal combustion system gives effective operation of the vehicle and can provide a stable recharge power source of the battery system. Integration of a small diesel engine connected to the battery systems, and modification of the UUV hull structure for the snorkeling operation could give better alternatives for both recharging and propulsion of the MCM UUV in the meantime [25].
A diesel submarine is a very good example of hybrid power supplying and sharing systems. The two or more sets of diesel engines in most diesel submarines can run propellers or can run generators that recharge a huge battery bank, or work in combination mode; one engine driving a propeller and others driving a generator. The submarines should run the diesel engines, they must surface or cruise just below the surface of water using snorkeling, and once the batteries are fully charged, the submarine can dive to underwater operations [8]. These diesel battery hybrid power systems are controlled by vehicle management computers and a main AI expert mission management system. Combined power generation, and the control system structure are given in Figure 6.
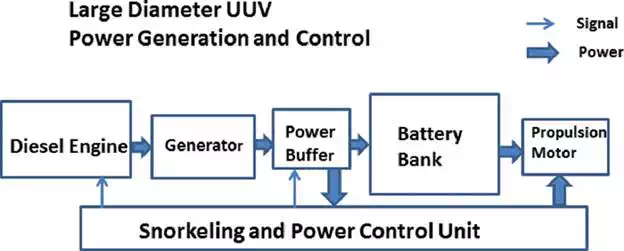
FIGURE 6.
Power management system of MCM UUV.
System measure of effectiveness
SYSTEM EVALUATION MODEL
Recently, UUV systems have emerged as a viable technology for conducting underwater search and neutralization operations in support for the naval MCM missions. In the final phase of the system design process, either conceptual or actual, justification studies for the proposed design should be carried out with functional and cost-effectiveness evaluations. In this section, analytical frameworks for evaluating the proposed MCM disposal UUV unit are developed based on the part of current US naval underwater ship design procedure [27, 28].
The evaluation models provide means to relate the effectiveness matrices to the system-level performance parameters. These individual capabilities can be stated in terms of vehicle subcomponents, such as sensors, data storage, processing unit, communication systems, navigation instrumentations, and disposal payload items. The evaluation framework is based primarily on the approach that combines several well-known systems engineering practices and decision making methods in a framework suitable for naval ship design [29].
The general approach of measure of effectiveness (MOE) investigation is to make high-level model as generic as possible and to increase detail and resolution with each progression into the low-level models [27]. This is accomplished by developing separate model subcomponents and linking them together to form the overall system model.
SYSTEM EFFECTIVENESS MODEL
For the entire MCM evaluation framework, the specific operational requirements can be defined as follows; the MCM operations with mine reconnaissance, classification, localization and mine neutralization; the autonomous operations with minimal reliance on support platforms; safe recovery of the vehicle system unit. The effectiveness model has been established through considering the operational requirements for MCM autonomous vehicle systems and comparing those requirements to the existing MOE to determine where the changes are needed as in Figure 7 [27].
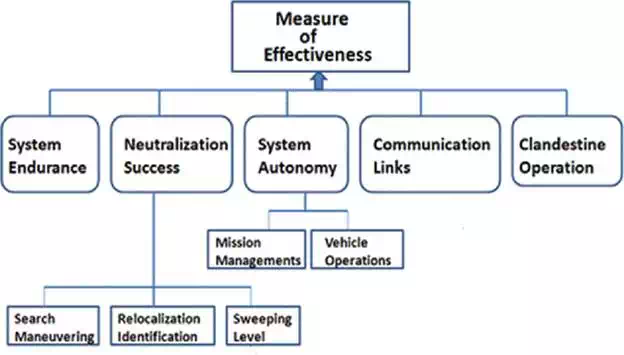
FIGURE 7.
Structure of system MOE evaluations.
Thus, for the MCM UUV disposal system unit, the mission time, mission accomplishment, autonomy, communication and covertness form the highest level of the proposed MOE hierarchy [29]. As shown in Figure 7, the MOE evaluation for the proposed design has the following components: system endurance, neutralization success, system autonomy, communication links and clandestine operations.
The concepts for effective area coverage rates are better measured by time rate for mine search and actual neutralization activity, while operational time range is better for information, surveillance and reconnaissance (ISR) operations for long-term mine detection activities in wide areas. The effective area coverage rate can be defined as the ratio of the total search area to the total amount of time required to complete the MCM missions from launching to recovering of the UUV system. Duration of designed mission time is fundamentally based on UUV system hardware capability related to energy source, speed, operational load and hotel power consumptions [30].
Mine neutralization or sweeping success is the main object of MCM operations, and this MOE represents the estimated probability of search/classification of mines, as well as mission accomplishment for mine clearing. Mine reconnaissance and clearance are the two basic MCM missions, and the major objectives of mine reconnaissance are accurate search, localization and containment of designated mine in the contacts. Search level refers to cumulative probability of mine detection and relocalization, classification and identification within specified MCM operational areas. For the mine hunting, and neutralization phase, the MOE will be scored from minesweeping levels and the search level, confirming relocalization accuracy. The measures of mine neutralization success are defined by performances of the individual disposal weapon system and by successful identification of mines, which is expressed by the probability measures based on the history of mission maneuvering trajectory, performances of identification sensor systems and conditions of complex underwater environments [28].
The autonomy measure represents mission management, and vehicle operations related to the independence of the system from human oversight for the mission tasks. The area of mission managements consists of execution/service commands, communication links among MCM operations and logistics support relating to launch and recovery of the small UUV unit. The mission management requirement is specified in terms of discrete host responsibility alternatives, such as performance of system platforms, remote command and control (C2) and integration of mission activity by subdivisions via operation executions [28].
Measure of dynamic vehicle operations is also based on the degree of intelligence of vehicle maneuvering, obstacle avoidances and optimal path planning. The degree of autonomy of vehicle operations is determined by the level of guidance/navigation/control (GNC) of vehicles and obstacle avoidance/optimal path planning required during the MCM mission operations. The nature of this kind of MOE characteristics is well defined in the department of defense(DoD) level of autonomy for autonomous vehicle criteria by the number, capability of processing unit and data base capacity for decision making within specific missions [29, 30].
Summary
In this study, we investigate the current MCM systems and evaluate the technologies to be improved for future mine neutralization operations. The configuration of hybrid MCM UUV systems has an effective future system design figure that relays a battery power system in conjunction with a diesel engine and an integrated AI expert applied autonomous system.
We try to make a larger and heavier UUV system with typical MCM missions and mission management algorithms with appropriate hardware configurations. Proposed larger displacement UUVs will be integrated into new platform designs in order for these systems to become viable organic assets. Realization of the full potential of the UUV as a truly autonomous undersea vehicle (AUV) in warfare with UUV system structure, functional specification of expert system controlled MCM UUV subsystem [30]. Hybrid power system is introduced and effectiveness discussions were presented and give the progressive transition guide line for a future larger displacement vehicle.