The Reliability of Autonomous Vehicles Under Collisions.
Over the decades, safety standards of the vehicles have been raised from the demands of the automobile users and organizations like Federal Motor Vehicles Safety Standards and Regulations (FMVSS) [1], National Highway Traffic Safety Administration (NHTSA) [2], European New Car Assessment Program (Euro-NCAP) [3], Society of Automotive Engineers (SAE) [4], etc. Superior technology evolved vehicles, which need more resources, offer diverse facilities for the occupants. Respecting the autonomous systems, more interventions of the drivers are starting to narrow. Although the yield of luxury and reliability, sometimes it operates against the occupants. During computer governing trips, individuals want to attain locations faster. In unexpected inaccuracy situations, automatic systems could cause fatal results.
However, the most common and important topic of vehicles is the crash-worthiness. Ensuring the reliability of the vehicles and safety of the occupants, the vehicle structure should be constructed in a way to absorb the impact effects and shock gradually, not to create a sudden deceleration which causes also injuries and fatalities. To decrease the failure risks, entire vehicle should be investigated, primarily starting from the basic structure of the vehicle under the perspectives of statics and strength of the materials. Then, the natural frequencies and the dynamic loading of the system should be incorporated into step by step. Generally for the dynamic loading, pre-captured dynamic road data also helps developing the vehicle structure. During the development period, beforehand defined systems like the concept design of the vehicle, and the shape should be protected, but the adaptation of the alterations should affect the design in minor.
Before determining the impact response and the behavior of the vehicle during a collision, the reasons of the accidents should be investigated. Serious amount of the accidents occur by the carelessness, negligence, and recklessness of the driver. The first one decreasing the risk of the collision is preventive driving techniques. This technique is a part of the education for the expert driving, although it refers time, patience, and talent. Yet, without any attention and enough reflexes, even this preventive method, results in frustration. In addition, if the all scenarios are considered the environmental and road conditions, and the faults of the other vehicles, including the drivers, effect the vehicles as other factors. Thence, the UAV technology becomes the redeemer of the system to solve the problems completely or decrease the errors to a sufficient level for a more reliable drive.
The most proper way to determine the causes is an experimental study, despite it is not a cost effective and time-consuming way. With the all other test methods such as positioning, loading, and calibrating, crash tests are the most significant ones. After the real-time collision tests, widely known experimental approach on the crash-worthiness researches is the sled test [2, 3, 5, 6]. The sled tests are more under-control when it is compared with the other methods. But again, the financial hassle is beyond the limits of the most companies and facilities.
Decreasing the expenses of the crash tests, many companies untangle their crash-worthiness difficulties after mandatory collision tests, with the computer-aided simulations. Consequently, computerized methods are immensely reliable, if almost, the last three decades are considered. To overcome the real-time simulations of the engineering problems, many developed computer-aided analysis softwares can be obtained from the market. Even though some of the softwares for an exact engineering solution such as structural analysis, impact analysis and thermal analysis remain part of the market is dealing with the multi discipline engineering solution packages serving for the finite element method (FEM). But for the general FEM and its solution methodology [7–9] is not focused on significant issues. Hence, the more applications in a software sometimes decreasing the expertise approach. According to our perspective, impact simulation codes indicate the prominent side of the vehicle collisions. Thereupon, for the impact procedures, explicit dynamics approach based on the FEM gets through the formidable problems, satisfactorily [10]. In Figure 1, FEM model (a) and a crash simulation (b) of a wheelchair and a seating system via sled scenario are given using the human mass adaptation to understand the crash worthiness [11].
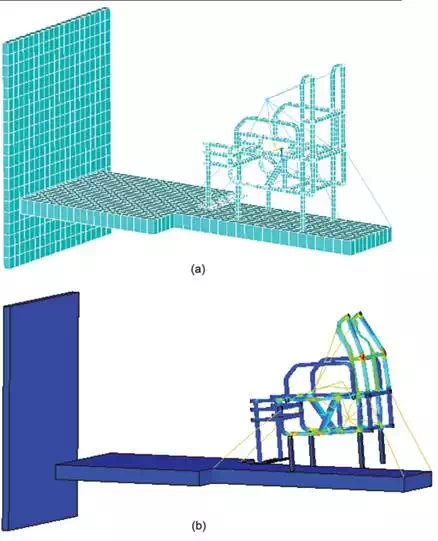
FIGURE 1.
(a) Finite element model of a wheelchair crash simulation via sled test, (b) Finite element simulation result of the model for a defined specific time.
One of the most popular and extensively used software for the impacts is LSDYNA, the product of the Livermore Software Technology Corporation (LSTC) [12]. This code is used by some of the software companies as a fundamental explicit dynamics solver. With the help of the validated FEM results, reliable procedures will be determined to figure out the real vehicle crash scenarios in an inexpensive way, even for the UAV technology. During improvements invariably, reverse engineering applications are in the process from beginning till the end to mend the faults scores of times.
Autonomous vehicles: the perspective of collisions
Recently, the importance of the unmanned autonomous vehicles for every day, industrial and military applications are rapidly increasing, regarding the demand of the market. It is complex enough not to start the mass productions for today, especially manufacturing ability in excessive numbers of the automobile industry is considered. But, when the issue is saving a human being, we should reconsider everything referring the military developments against terrorism or wars. The defense industry focuses on the aerial vehicles to check the required zones and decrease the threats by the enemies or the terrorists. An unmanned aerial vehicle (UAV) shown in Figure 2 in Ref. [13], widely used as a drone, or an unmanned aircraft system (UAS), and also referred by several other names, defines an aircraft without a human pilot. Therefore, an aircraft without a pilot means, alive human, but in the right hands yet, this sophisticated technology will be so perilous against innocents. And also, the more professionally UAS requires the more trained and talented personnel in particular formidable and arduous duties. This can possibly cause unexpected mistakes during the tasks that provoke impacts and collisions.

FIGURE 2.
Medium Altitude Long Endurance (MALE) UAV of Turkish Aerospace Industries, Inc.

FIGURE 3.
Google self-driving car.
The technological improvements in numerous dissimilar segments are effecting the UAV technology too, like media and entertainment. With the help of the lately used drones are easily operated, simple and cheap widely used by the professionals likewise amateurs in various applications. This option introduces some hazardous results with the ease of the system. Although the price of the simple applications like drones less when it is compared with the complex vehicles, consequences could be analogous.
If we focus on the automobile industry some leading companies like Google have been paying attention for autonomous cars for a while. See Figure 3 [14]. After spending many years to research and development, the shown up products of UAV technology on the roads are a quite impressive story.
With regret, even for the finest tech. companies, some of the undesired incidents bring about the damaging results of the UAV. The self-driving car of the Google collided with a public transportation bus in California, USA (Figure 4 in [15]) on February 14, 2016. In spite of the highly developed vehicle technology, it is indispensable to face with collisions for some cases.

FIGURE 4.
Collided self-driving car of Google.
Whatever is done or planned for evolving the UAVs, sometimes these vehicles encounter with inevitable problems, and thus, it will be concluded with accidents as it was not planned. Under these circumstances, vehicle safety and crash worthiness should be taken care of in a comprehensive viewpoint.
Causes and prevention methods of collisions
Involuntary emerged incidents by the humans, vehicles, and environmental effects may cause accidents randomly. Sometimes, the reasons are known and the sufficient prevention methods can be created for the safety of the vehicles or the occupants or the both of the occupants and the vehicles. Although the vehicle is UAV, the opponents or the other vehicles could be driven by the humans. Thus, the human existence should be considered evermore, while the robustness of the vehicles is acceptable. With reference to known conversant reasons of the collisions, inaccurate parts of the mechanical, electronical, or software-based problems could be adjusted. However, the human originated mistakes which can differ from one being to another are much harder to fix with straightforward solution approaches. The psychological, physiological, behavioral potential, capability, and carefulness of the humans will alter the results of the happenings. Sometimes, the reasons are known, but it is not able be figured out by anything else the events like the several natural disasters. Otherwise, if the reasons are not specified or estimated for the collisions, the new methodologies must be evaluated to diminish the odds of failures for both humans and the vehicles.
Considering the vehicle, which is not a UAV, can be also investigated for the safety of the pedestrians, occupants, regular vehicles, and the autonomous vehicles. The idea of preventive driving technique or expert skills will come into the minds for the human driver. Initially, validity of this opinion could be reasonable with the existence of the natural aptitude alongside the education of the preventive driving. Although the careful driving is very important, the reflex of a human body is a prominent factor of the innate talent effecting throughout the trip. Sometimes, this gained time in milliseconds can save lives when the human body reacts against an unexpected incident. Reflexes can be improved with the help of the practice, while we can assume this, as a learned or educated reflex.
Otherwise, if the reflex response is not satisfying the sudden handling situations, preventive driving education avails to avert the collisions during or before the accidents. This education covers primarily the calm driving in contrast with the aggressive and fast driving, refraining from the instantaneous movements of the steering wheel conducts the vehicle, sudden acceleration and decelerations in particular in tough weather and environmental conditions. To ensure a safe trip, an admissible space between the vehicles is a necessary approach to acquiring an enough time along the duration of the collision. Subsequently, scanning all around the vehicle with eyes and computerized systems for every single threat is the key factor for a reliable trip, like a radar system to perceive the risky ventures which could be possibly induced by anything else.
Afterward, the driver will face with the most critical phase: Decision! And the worst scenario is Uncertainty as an opposite situation signifying that “the worst decision is better than a hesitant behaviour.” If we consider the options for the decision:
● Deceleration,
● Pull over,
● Suddenly stop,
● Acceleration,
● Return,
● U turn,
● Slide,
● Skid,
● Drift,
● Changing lanes,
● Manage to do both of the selected ones or more, simultaneously or consecutively.
If there is no chance avoiding from the accident, try to be in the safe zone or select the least hazardous way via changing the speed and maneuvering the vehicle to save the lives and minimize the collision effects. Doing nothing and being petrified is not an option, it is just an ambivalent condition eventuating with an undesirable result.
Considering the hassle of the situation during collisions, these types of behaviors and applications are so difficult for a human to apply and need some expertise. It is not for everyone! Thus, if the computerized UAV system is capable to handle all of these situations at the same time, except some uncommon incidents, it will be much more robust and reliable for everyone, although we consider that sometimes human mind and body can create metaphysical and exceptional solutions.
Vehicle safety standards
When we talk about the Unmanned Autonomous Vehicles, it comprises the ground, aerospace, and even the naval vehicles. If we try to clarify the safety standards for all conditions, it will be in the detail redundantly. Ordinarily when the crash-worthiness and accidents are on the carpet, extensively known portrayal is covering the automobiles followed up by the aircrafts and the other vehicles.
For determining the vehicle safety standards of the automobiles, some major organizations take place in the decisive position in the industry and the market. However, the most important role in framing the ideology of the crash testing is in the hands of the Federal Motor Vehicle Safety Standards and Regulations (FMVSS) and the National Highway Traffic Safety Administration (NHTSA) in the USA as one of the leading countries for the vehicle safety. In the NHTSA internet site [16] of the US Department of Transportation for the Federal Motor Vehicle Safety Standards and Regulations, safety assurance defined in four major topics given below:
1. Crash avoidance: Standards between 101 and 135 (Part 571),
2. Crashworthiness: Standards between 201 and 224 (Part 571),
3. Post-crash standards: Standards as 301, 302, 303, 304 and 500 (Part 571),
4. Other regulations: Standards between 531 and 595.
It is very important to point out, especially the contents of the crashworthiness for our point of view:
● Occupant Protection in Interior Impact,
● Head Restraints,
● Impact Protection for the Driver from the Steering Control System,
● Steering Control Rearward Displacement,
● Glazing Materials,
● Door Locks and Door Retention Components,
● Seating Systems,
● Occupant Crash Protection,
● Seat Belt Assemblies,
● Seat Belt Assembly Anchorages,
● Windshield Mounting,
● Child Restraint Systems,
● Side Impact Protection,
● Roof Crush Resistance,
● Bus Emergency Exits and Window Retention and Release,
● Motorcycle Helmets,
● Windshield Zone Intrusion,
● School Bus Rollover Protection,
● School Bus Body Joint Strength,
● School Bus Passenger Seating and Crash Protection,
● Rear Impact Guards,
● Rear Impact Protection.
In another perspective for the crash testing, in the internet site of the crash network [17] expresses the headings in different groups: interior testing, dash board, frontal impact, side impact, steering wheel, seats, seat belts, rear impact, rollover, head rests, and roof crush. Considering the developments in the vehicle industry including automobiles and aircrafts, etc., especially the UAVs, many countries trying to improve new methodologies against the collisions comprising hundreds of standards. The major idea for the crash worthiness is protect the occupants or all beings, and eliminate or diminish the damages caused by the collisions.
Crash worthiness and crash tests
The occupant safety and vehicle reliability are the fundamental topics that should be developed against collisions for the crash worthiness. Although the technology is evolved in many fields especially for the materials science comprehending composite materials and withal super collapsible beams to absorb impact energy, again if we are not able to provide a safe drive for the occupant or the vehicle it is going to be a fact that can be concluded with the injuries or fatality for the driver, passengers or the people outside while the vehicle face with the physical damage like self-destruction as a result of collision to the wall, barrier or a structure; accident with another vehicle via front, behind or side impacts; and maybe a rollover incident by some other effects. These are by definition may differ from one incident to another defining the accidents of vehicles even for the autonomous systems. Whatever happens, the engineers should design a structure that can able to absorb some of the energy by collapsing itself or deforming to an adequate level to protect the human beings. If the structure is too rigid, there is an amplification occurs and affect everything in a poor way that is transferring the accelerations to the occupants causing worse situation. Therefore, even for the safety and reliability, optimum way is better to protect lives against accidents.
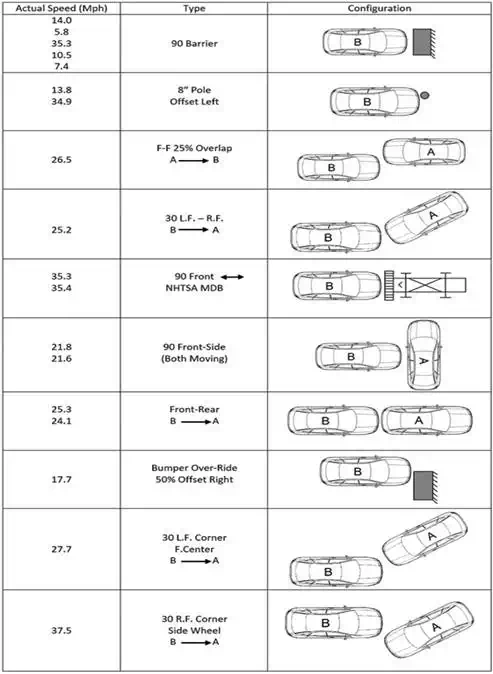
FIGURE 5.
Crash test modes.
To determine the crash response, broad amount of tests have been carried out for many years by the validated official agencies for crash worthiness. During the collisions under the combined loading conditions, the application of the crash energy management is dependent to plenty of situations, starting with contact mechanics and collapse modes that could be in the axial and/or in bending way causing many other reactions. According to Huang [5], the crash tests were chosen after reviewing some previous works around the world, accident statistics, and experience with the Ford Tempo air bag fleet based on the real-world crash investigations. The tests consisted of car-to-car tests versus barrier and fixed pole tests. Crash data were accumulated from the 22 vehicles; the chosen tests representing a vast range of accidents at or near the expected threshold of air bag deployment. There are 22 vehicles in 16 tests, as shown in (Figure 5), were used to gather the crash pulse data. For every test, the selected impact speed is a key factor to check the system performance of the air bag sensor will be activated or not during the incidents. Due to mentioned circumstances, we can define the types of the impacts [5]:
1. A perpendicular (90°) barrier,
2. A low- and high-speed rigid pole,
3. A front-to-front overlap,
4. An oblique front to front (three types),
5. A vehicle front to an moving deformable barrier (MDB) perpendicular,
6. A vehicle front-to-side,
7. A front-to-rear,
8. A bumper over-ride (or truck under-ride).
The tests can be classified in three categories: component tests, sled tests, and full-scale barrier impacts. Because of the complexity and many distinct test variables in full-scale tests, there is an acceptable reason in the reduction of the test’s repeatability. The impact test depicted in (Figure 6) is representing a full-scale vehicle-to-vehicle impact test of Toyota Motor Company while they are developing a new safety system for their automobiles [18]. The dynamic and/or quasi-static response of an isolated component is defined by the component tests are exalted to detect the crush mode and energy absorbing ability. With the help of the component tests, it also gives the capability to the designers to develop prototype substructures and mathematical models. Moreover, the vehicle rear structure full-scale tests are governed either via a deformable barrier or a bullet car to state the integrity of the fuel tank. To evaluate roof strength according to FMVSS 216, a quasi-static load is applied on the “greenhouse,” and providing that the roof deformation falls below a particular level for the applied load [6].

FIGURE 6.
Vehicle-to-vehicle impact test of Totoya Motor Company.
For the sled test, engineers use a representation of a passenger compartment (buck) with all or some of the interior parts like seat, front panel, steering system, seat belts, and air bags. Anthropomorphic Test Devices or “Dummies” (ATD) or cadaver subjects are seated in the buck, utilized to simulate an occupant subjected to dynamic loads which is similar to a vehicle deceleration-time pulse, to determine the response in a frontal impact or side impact. To appraise the restraints of the system the sled test is a significant topic recorded by the high-speed cameras and photography applications for the dummy kinematics. It should also be stated that the performance of the ATD is determined at a higher impact speed of 35 mph in the NCAP test. Throughout the NCAP test, the restrain system is composed of three-point lap/shoulder belt system, and also additional restraint air bag. When we pay attention to the detail of the impact tests, numerous numbers of sensors as accelerometers, load cells, etc., located in the dummy and on the restraints, screen the forces and moments assisting to specify the impact reactions. Event data recorders have a very important role to understand the behavior of the system during accidents. However, when the recorded data will be analyzed digital filtering and reducing the noise (unwanted data) effect the results. Thus, it should be figured out cautiously.
Driving through the highways or freeways, the barriers are limiting the vehicles to get out of the road and protecting it, from crossings. During the barrier impact test there is a guided vehicle, canalized into a barrier with a predetermined initial velocity and angle. The purpose of the test is to maintain a structural integrity of the vehicle and adherence to the mandatory government regulations. The fully equipped vehicle collides a barrier at a 0°, +30°, and −30°, respectively, from an initial velocity of 30 mph.
The frontal offset impact test is another method acting with 40–50% overlap stating that the impact target could be rigid or deformable.
For the full-scale side impact test, a deformable barrier moving towards the left or right side of the vehicle with an initial speed at a certain angle (FMVSS 214). Especially for this test, side impact dummies (“SID” For the US and “EURO SID1” for Europe) which have different shape and properties, are used in the driver and outboard rear seat positions.
When the human parts are considered, the ATDs are widely used and capable enough to demonstrate the behaviors of the human nature in a fundamental way, even when it is indicating the spine, head, brain, organs, knee injuries, and whiplash incident in particular.
Explicit dynamics approach in FEM for the impact scenarios
The finite element method has been used by many scientists and engineers for decades to advance systems in different engineering applications for the validations, while reducing the experimental investments and the expenditure of the tests. This widely known method developed via the contributions of the researchers all around the world. While FEM problem is thriving, we will break the problem domain into a collection of 1D (dimensional), 2D and 3D shapes to form the discretization. Starting with the simplest way, {F} = [K] {D} where F, K, and D, are the nodal force vector, global stiffness matrix and nodal displacement vector, respectively, as usually known. The displacements in this equation are the unknowns which should be found and lead us to figure out the strains and stresses, etc. To solve the equations, generally, the direct stiffness method, variational technique, or weighted residual approaches are used. However, this fundamental technique is now capable enough to handle the issues lately popular like the fracture mechanics with an extended finite element method, cohesive modeling, contact algorithms, smoothed-particle hydrodynamics (SPH) and Arbitrary Lagrangian–Eulerian Method (ALE), etc. Regarding recent a few decades, requisition of a nonlinear mechanics or engineering plasticity, for the delicate and slightly designs which should be robust in tough conditions, induced the durability tests including impacts and crashes. Explicit dynamics approach in FEM emerges with this idea to untangle the difficulties of the impacts, drop tests, explosions, and collision scenarios.
Vehicle technology under the perspective of the crash worthiness and safety during the collisions via crash tests to explicit dynamics simulations of the FEM is a trustworthy way to follow up. If we have a dekko to the literature some valuable studies can be determined [5, 6, 19] about the vehicle crash worthiness and the safety, while some books [6, 10, 19] explain the details of explicit dynamics one of the most challenging nonlinear problems in structural mechanics.
The implicit FE solution technique delivers accurate results as long at the stress levels in the beam do not exceed the yield-stress value, thus remaining in the linear (elastic) region of the material curve. Because the implicit solver usually obtains a result with a single step, according to the slope of the material curve, which is represented by Young’s modulus, for the plastic region of the material there will be an inaccuracy whereat the slope is changed up the plastic characteristics. It means that the implicit solver is very powerful for linear (static) finite element analysis (FEA); thence, it provides an unquestioningly stable solution methodology.
Unfortunately, the implicit solution approximation may have difficulties with the immensely nonlinear finite element models. Additionally, inverting extremely large stiffness matrices with the implicit solver might consume too much time and memory. Although this method is not logical to use in highly nonlinear problems, it can able to calculate the equations with the help of the iteration cycle, which is applying the load in minor increments called as “timesteps” [19].
During the accident, the vehicle body faces with the impact loads propagate localized plastic hinges and buckling. So the large deformations and rotations with contact and heaping between the many parts can be determined. One of the most important ideas for the explicit dynamics is the wave effects, primarily involved in the deformation stage, associated with the higher stress levels. When the stress level exceeds the yield strength and/or the critical buckling load and the localized structural deformations comprise throughout a few wave transits in the frame of the vehicle. The effects of the inertia will chase this step and also dominate the ensuing transient reaction. The collision could be considered as a less dynamic incident if there is a comparison between the ballistic impact and the vehicle crash. Closed-form analytical problems for the impact scenarios in structural mechanics offer tough times for everyone. Therefore, the numerical methods arise with the practical options to decipher the unknowns.
A set of nonlinear partial differential equations of motion in the space-time domain is solved numerically by the explicit dynamics approximation, related to the stress–strain properties of the material about the initial and boundary conditions. To obtain a set of second order differential equations in time, the equations in space are discretized by the solution in the course of formulating the problem in a weak variational form and supposing an acceptable displacement field. Subsequently, in the time domain, discretization calculates the system of equations. If the selected integration parameters deliver the equations coupled, the technique is defined as implicit, while the solution is unconditionally stable. Furthermore, if the solution will be defined as explicit, the equations should be decoupled by the selection of the integration parameters, and it is conditionally stable [6].
As Du Bois et al. [6] described, a set of hyperbolic wave equations in the region of effectiveness of the wave front is figured out via the explicit dynamics, even then it does not require coupling of large numbers of equations. Yet, the unconditionally stable implicit solvers requiring assembly of a global stiffness matrix provide a solution for all coupled equations of motion. Especially considering the impact and vehicle crash simulations, including the utilization of contact, several material models and withal a combination of non-conventional elements, the explicit solvers show up more potent and computationally more productive than the implicit solvers, while the timestep is about two to three orders of magnitude of the explicit timestep. “Explicit” defines an equilibrium at a moment in time that the displacements of the whole spatial points are known in advance. With the help of the equilibrium, we can determine the accelerations; moreover, the use of central differencing technique assures to establish the displacements at the next timestep and reiterate the process. And also, the only inversion of the mass matrix, M, is enough for this procedure.
There should be stated that if the lumped-mass approximation is utilized the mass matrix will be diagonal, so there is no obligation of the matrix inversion. When the uncoupled equation system is figured out, the results will be in a very fast algorithm. For the minimum memory exigency, the assembly of a global stiffness matrix should be avoided by using an element-by-element approach for the calculation of the internal forces. The explicit integration will be second order accurate when it is applied attentively. Utilization of the related nodal displacements and/or velocities, the stresses are calculated discretely for each element, causing the effect of the loads on one part of the element onto the opposite part which is simulated by each timestep. Accordingly, the stress wave propagation is demonstrated through the element clearly. The deficiencies of the explicit solution technique are the conditional stability and the weak approximation of treating the static problems. The meaning of the conditional stability of the explicit integration algorithm is the integration timestep must be smaller than or equal to an upper bound value known as the Courant condition,: Δt≤lccΔt≤lcc explaining that the timestep must not pass over the smallest of all element timesteps identified by dividing the element characteristic length through the acoustic wave speed through the material from which origin the element is made like Du Bois et al. [6] mentioned. And they also said that the numerical timestep of the analysis must be smaller than, or equal to, the time required for the physical stress wave to pass by the element. If we try to explain it in a straightforward way, c of the mild steel elements is about 5000 m/s with a characteristic length of 5 mm for the automotive field practices concluding with 1 μs for the analysis timestep. Consequently, incidents dealing with the short duration of time are appropriate for the explicit dynamics solution technique enclosed with superior nonlinear behaviors and loading velocities demanding small timesteps for more precision sequels.
The integration of the equations of motion defines the time integration:
![]()
or in a different representation,
![]()
The basic problem is to determine the displacement, xn+1, at time tn+1. We can also say that [K]{x} = {Fint}. By the way, the explicit direct time integration can in a conceptual form be written as:
![]()
The equation shows that the solution depends on nodal displacements, velocities, and accelerations at state n, quantities which are known. Therefore, the equation can be solved directly. And for the implicit:
![]()
This equation represents the solution that depends on nodal velocities and accelerations at state n + 1, quantities which are unknown. This implies that an iterative procedure is needed to compute the equilibrium at time tn+1.
If we try to define the time increments:
![]()
![]()
![]()
![]()
Then, the central difference method is used for the velocity:
![]()
And
![]()
When Δtn+12/=tn+1−tn is used, we get:
![]()
With the help of the acceleration, velocity can be stated as:
![]()
With
Δtn=tn+12/−tn−12, the velocity is given below:![]()
From the Eq. (2), the acceleration at an+1 can be found like:
![]()
Remember, the damping force is taken at x˙n+12/x˙n+12. The new velocity will be calculated with the old velocity and acceleration by Eq. (13). From this result, displacement will be updated at Eq. (10). Consequently, the new internal and external forces help for determination of the new acceleration [Eq. (14)].
Considering the LSDYNA, the widely known commercial explicit solver, the procedure for the solution steps is given below:
When t = 0, it will be the beginning of the solution loop or cycle. Whereupon, the displacement will be updated at Eq. (10), while the velocity is also updated at Eq. (13). Then, the internal forces (strain rate, strain, stress, and force magnitude) will be computed looping over the elements. Subsequently, external forces will be calculated to reach the computation of the accelerations at Eq. (14) which is finalizing the initial loop. Thereafter, following loops will go through the process again and again, until the convergence criteria will be satisfied.
For the robust design, stress wave propagation, timestep adjustment, critical element length and finally, the mesh size and quality are the factors, will be considered carefully to affect the simulation performance in a better way.
Due to the reliable side of the explicit dynamics solution methodology, we indicated the differences between the implicit and explicit solver for the approximation of the vehicle crash simulations and safety of the occupants and vehicles. We can possibly say that, for the collision of the regular or autonomous vehicles the accident results will be similar that should be taken care of precisely.
CRASH SIMULATIONS OF THE VEHICLES
The studies about the crash worthiness and impact scenarios as explained in the previous section are based on the explicit dynamics solution technique resulting with the satisfactory approximations. Some of the commercial codes for the explicit dynamics simulations are embedded inside the multidiscipline FEA programs such as ABAQUS, ANSYS, and MSC softwares, even though some of them working alone for just these types of applications as LSDYNA, PAMCRASH, etc. As it was mentioned, before these softwares are auxiliary engineering applications for solving the problems with the numerical methods. The most important task is the prediction of the failures of the system or structure of the vehicle and the problems that occupants can be faced. When the prediction of the simulations is validated, it can be said that FEM code has done its job properly.
To comprehend the validation of the simulations with the real crash tests, numerous topics should be investigated before, during or after the simulations. We can simply name these steps like: before the process is pre-processing, during is processing or simulation, and after the processing is post-processing.
Pre-process section is dealing with the creation of the finite element model, starting from the Computer-Aided Design (CAD) of the structure or the system, material descriptions or modelling, element selections, defining the boundary conditions (describing the loads, displacements and support properties, etc.) and initial values like velocities, adjusting the contact algorithms, total time and timestep size definition. For more elaboration, mass scaling factor and/or hourglass controls can be adjusted. Considering the information given, the geometry should be meshed as smooth shapes as possible. During the mesh generation element, sizes are so prominent, will affect the simulation time, according to the number of the elements. If the mesh is coarse, there will be a weak approximation and short period of processing time, notwithstanding if there is a finer meshed model exists, the convergence rate will be better, while the processing time is prolonged. Thus, there should be an optimum mesh size for the common structure; however, the significant zones are meshed with finer elements to increase the stability and for the better result.
When the simulation is processed, the finite element model is ready for the post-processing. The most considerable issue for the impact is absorb or get rid of the shock energy by different methods like geometrical change of the structure, material selection, and application. The second problem is the large deformation of the structural components. Additionally, changing the parameters of the simulation model will affect the results widely depending on the experience of the analyst. Because of dealing with the highly plastic problems and non-linearity during collisions, the analyst needs to possess deep knowledge about nonlinear finite element analysis for continuum mechanics [20–22]. It should be stated that the analyst can be faced with the geometrically nonlinear problems or material nonlinearities which is imported to be expressed.
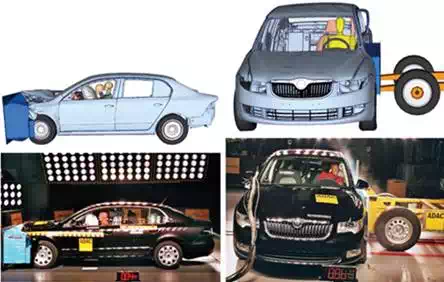
FIGURE 7.
The vehicle crash test and simulation.
Regarding the details of the post-processing, we will start to observe and evaluate the simulation outputs, step by step. While we are investigating the steps of the impact scenario, kinetic energy change, absorbed energy amount, deformations and displacements, strain and stress distribution, and some other major issues should be appraised attentively and the results should be validated with the real crash tests. Besides, the effects of the different components, deformation characteristics, and the changes of the parameters must be observed and the behavioral outcomes of the incident should be crosschecked with the real situation. The literature is replete with numerous of interesting researches about the crash-worthiness of the vehicles and the occupant safety including the Anthropomorphic Test Dummy (ATD) test and simulations [23–27]. Especially LSDYNA conferences are popular with the presentations of the explicit dynamics simulations and also most of the papers can be reachable from the internet site of “DynaLook” [28]. For a better representation of an explicit dynamics simulation, Figure 7 demonstrates the full vehicle crash scenario [29].
Conclusion
Whole crash-worthiness studies are remarkable starting with the elementary functions of the profound methods of NCAP tests considering despite the costs of the experiments are enormous, contribution of the test results is challenging.
For a robust vehicle, the engineers should design a structure that can able to absorb some of the energy by collapsing itself or deforming to an adequate level to protect the human beings. If the structure is too rigid, there is an amplification occurs and affect everything in a poor way that is transferring the accelerations to the occupants causing worse situation. Therefore, even for the safety and reliability, optimum way is better to protect lives against accidents.
Nevertheless, for diminishing the costs of the studies of FEM and explicit dynamics methods, which are proceeding under the supervision of the computers and codes verified by the long-term researches and applications, are competent to handle the complicated algorithms yielding with satisfactory results. The incidents dealing with the short duration of time are appropriate for the explicit dynamics solution technique enclosed with superior nonlinear behaviors and loading velocities demanding small timesteps for more precision sequels.
Take into account the results of the experiments, analytic solutions and computerized methods are mentioned as FEM codes are robust approximations to understand the behavior of the vehicle and occupants in the course of statics, dynamics, and collisions. Consequently, the finite element method and explicit dynamics solutions have been proven to validate the experiments and real life experiences in the range between 80 and 100%.
It should be clearly stated that the autonomous vehicles decreasing the risks of the collisions when it is compared to the human driver controlled vehicle.