Base Bodies of Robots: Articulated Robot Base
Articulated Robots have all the joints of single axis revolute or rotary type. This chain of revolute joints provides greater freedom and dexterity in movement of the articulated robotic arm. SCARA and PUMA are the most popularly used articulated robots in assembly lines and packaging processes.
Types of robot bases discussed so far in the last two article series started with the most simple and basic single axis and single degree of freedom robot base, capable of movement only in one direction, linear robot base. Linear robot base has only prismatic joint. Going to higher types of robot bases the number of joints increase then the types of joints start changing. Starting from one prismatic joint to three prismatic joints then with each changing type one prismatic joint was replaced by a revolute or rotary joint.
The robot bases with prismatic joints require many components for the actuation of the prismatic pairs. A Cartesian, Cylindrical or Spherical and Articulated robots all work in three dimensional space and can reach any points in there workspace. But the number of components required to obtain the desired motion is more, such as hydraulic or pneumatic cylinders, rack and pinion arrangements, solenoids and many switches. The same motion in robots with revolute joints can be obtained by increased ease and reduced number of components. The reduced number of components reduces the probability of failure of the robot. Only the programming of the robot and the transformation from global coordinates to the actuators input becomes more complex.
Articulated Robot structure
Cylindrical Robot base has one revolute joint and two prismatic joints. Spherical Robot base has two revolute joints and one prismatic joint. After these two types, further the robot base is generalized as Articulated Robot base with all the joints being revolute joints. Any robot with revolute joints between all its base members falls in the category of articulated robot. The number of members in an articulated robot can be anything from two to ten. The axes of the revolute joints can be parallel or orthogonal to each other with some pairs of joints parallel and others orthogonal to each other.
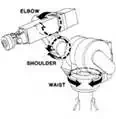
Articulated robots have a base called as waist which is vertical to the ground and the upper body of the robot base is connected to the waist through a revolute joint which rotates along the axis of the waist. Another link is also connected to the waist through a revolute joint perpendicular to the waist joint. This joint between the waist and the link is called as Shoulder of the articulated robot and the link may be called as the Arm. One more link is connected to the arm through a revolute joint parallel to the shoulder joint. This joint with the arm forms the elbow of the articulated robot. Finally a wrist and a gripper is attached to the last link. The structure of the articulated robot with three revolute joints is very much similar to the human arm.