In TSL mechanism, there can be a problem of priority inversion. Let?s say that there are two cooperative processes, P1 and P2.
The priority of P1 is 2 while that of P2 is 1. P1 arrives earlier and got scheduled by the CPU. Since it is a cooperative process and wants to execute in the critical section hence it will enter in the critical section by setting the lock variable to 1.
Now, P2 arrives in the ready queue. The priority of P2 is higher than P1 hence according to priority scheduling, P2 is scheduled and P1 got preempted. P2 is also a cooperative process and wants to execute inside the critical section.
Although, P1 got preempted but it the value of lock variable will be shown as 1 since P1 is not completed and it is yet to finish its critical section.
P1 needs to finish the critical section but according to the scheduling algorithm, CPU is with P2. P2 wants to execute in the critical section, but according to the synchronization mechanism, critical section is with P1.
This is a kind of lock where each of the process neither executes nor completes. Such kind of lock is called Spin Lock.
This is different from deadlock since they are not in blocked state. One is in ready state and the other is in running state, but neither of the two is being executed.
Turn Variable or Strict Alternation Approach is the software mechanism implemented at user mode. It is a busy waiting solution which can be implemented only for two processes. In this approach, A turn variable is used which is actually a lock.
This approach can only be used for only two processes. In general, let the two processes be Pi and Pj. They share a variable called turn variable. The pseudo code of the program can be given as following.
For Process Pi
Non - CS
while (turn ! = i);
Critical Section
turn = j;
Non - CS
For Process Pj
Non - CS
while (turn ! = j);
Critical Section
turn = i ;
Non - CS
The actual problem of the lock variable approach was the fact that the process was entering in the critical section only when the lock variable is 1. More than one process could see the lock variable as 1 at the same time hence the mutual exclusion was not guaranteed there.
This problem is addressed in the turn variable approach. Now, A process can enter in the critical section only in the case when the value of the turn variable equal to the PID of the process.
There are only two values possible for turn variable, i or j. if its value is not i then it will definitely be j or vice versa.
In the entry section, in general, the process Pi will not enter in the critical section until its value is j or the process Pj will not enter in the critical section until its value is i.
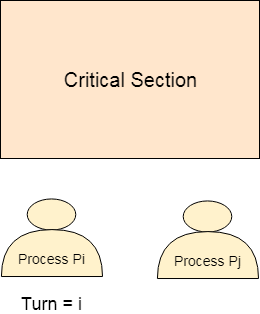
Initially, two processes Pi and Pj are available and want to execute into critical section.
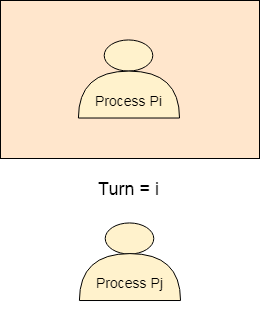
The turn variable is equal to i hence Pi will get the chance to enter into the critical section. The value of Pi remains I until Pi finishes critical section.
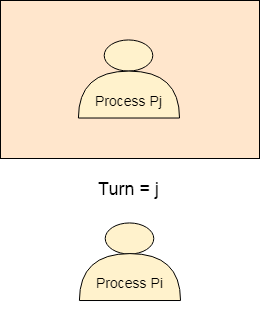
Pi finishes its critical section and assigns j to turn variable. Pj will get the chance to enter into the critical section. The value of turn remains j until Pj finishes its critical section.
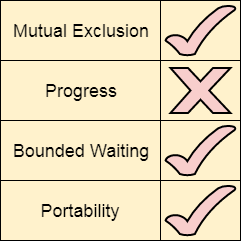
Let's analyze Strict Alternation approach on the basis of four requirements.
The strict alternation approach provides mutual exclusion in every case. This procedure works only for two processes. The pseudo code is different for both of the processes. The process will only enter when it sees that the turn variable is equal to its Process ID otherwise not Hence No process can enter in the critical section regardless of its turn.
Progress is not guaranteed in this mechanism. If Pi doesn't want to get enter into the critical section on its turn then Pj got blocked for infinite time. Pj has to wait for so long for its turn since the turn variable will remain 0 until Pi assigns it to j.
The solution provides portability. It is a pure software mechanism implemented at user mode and doesn't need any special instruction from the Operating System.