DC Motor Drives
Everywhere DC motors are used in large
applications, the use of drives are very necessary for the smooth running and
operating of these motors. The DC motor drives are used mainly for good speed
regulation, frequent starting, braking and reversing. Before enlisting the practical applications
of the drives used for DC motors, we will discuss about the different operation
of electric
drives for
different purposes:We know
that, normally the rotor of a DC motor is energized by the commutation process
through brushes. So the maximum allowable starting current is determined by the
current which can be safely carried out by the brushes without sparking. In
general, the motors are such designed that they can carry almost twice of the
rated current during starting condition. But for some specially designed
motors, this can be almost 3-5 times of the rated current. But why so much
current flows through the circuit of DC motors during the starting condition ?
This is because
when the motor is at stand still condition, there is only a small armature resistance present in the
circuit so no back emf is
generated. That is why when the motor is started with full supply voltage across its terminal,
there is a huge current flow through the motor, which may damage the motor
because of heavy sparking across the commutators and a huge amount of heat is
generated. That is the reason why some precautionary measures are taken during
the starting
of the DC motors.
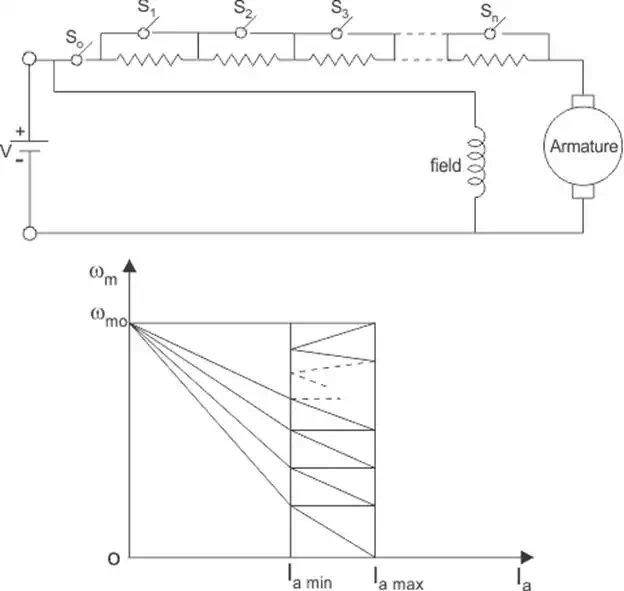
The speed of a
DC motor drive is usually controlled by variable resistance method, which can be
also used to limit the starting current as shown in the figure below. When the
motor gains speed and the back emf increases, the resistances are cut
out one by one from the circuit and therefore the current is kept within
permissible limit.
Braking of DC Motors
Braking is a
very important operation for DC motor drives. The need of decreasing the speed
of a motor or stopping it totally may arise at any moment, that’s when braking
is applied. braking of
DC motors is basically developing a negative torque while the motor works as
generator and as a result the motion of the motor is opposed. There are mainly
three types of braking of DC motors :
1. Regenerative braking
2. Dynamic or rheostat braking
3. Plugging or reverse voltage
braking.
Regenerative braking takes place when the generated energy is supplied to the
source, or we can show this via this equation :
E > V and negative Ia.

As the field flux cannot be increased beyond a rated value, so regenerative
braking is possible only when the speed of motor is higher than the rated value.
The speed torque characteristics is shown in the graph above. When regenerative
braking occurs, the terminal voltage rises and as a result the source is
relieved from supplying this amount of power. This is the reason why loads are
connected across the circuit. So, it is clear that regenerative braking should
be used only when there are enough loads to absorb the regenerative power.
Dynamic Braking is another type of braking of DC motor drives where the
rotation of the armature itself causes the braking. This method is also a
widely used DC motor drive system. When braking is desired, then the armature
of the motor is disconnected from the source and a series resistance is
introduced across the armature. Then the motor acts as a generator and current flows
in the opposite direction which indicates that the field connection is
reversed. The diagram for separately excited and series DC motor both are shown in
figure below.
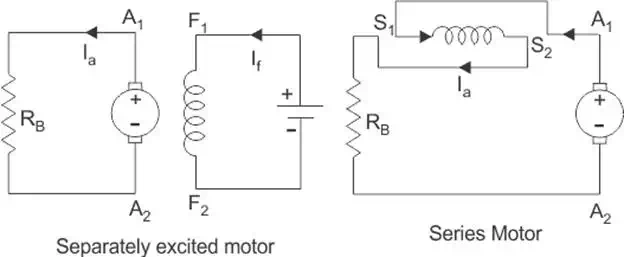
When braking is required to occur quickly the resistance (RB) is
considered to be of some sections. As the braking occurs and the speed of the
motor falls, the resistance are cut out one by one section to maintain the
light average torque.
Plugging is a type of braking where the supply voltage is reserved when the
need of braking arises. A resistance is also introduced in the circuit while
braking takes place. When the direction of the supply voltage is reserved, then
the armature current also reserves forcing the back enf to a very high
value and hence braking the motor. For series motor only armature is reversed
for plugging. The diagram of separately excited and series excited motors are
shown in the figure.

Speed Control of DC Motor Drives
The main
application of electric drives can be said as the need of braking of DC motors . We
know the equation to describe the speed of a rotating DC motor drives is as
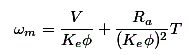
Now, according to this equation, the speed of a motor can be controlled by the
following methods
1. Armature voltage control
2. Field flux control
3. Armature resistance control
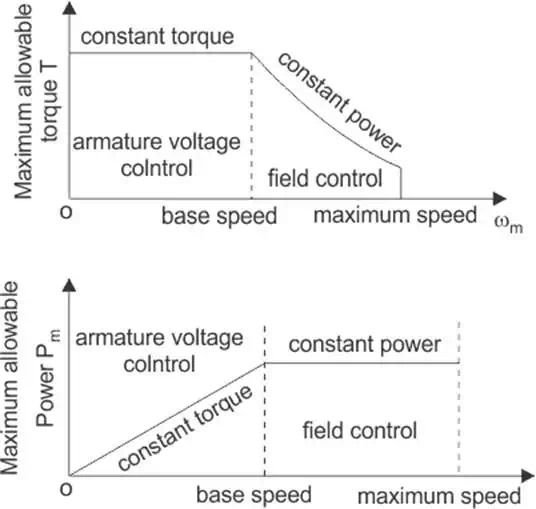
Among all of these, armature voltage control is preferred because of high
efficiency and good speed regulation and good transient response. But the only
disadvantage of this method is that it can only operate under the rated speed,
because the armature voltage cannot be allowed to exceed rated value. The speed
torque curve for armature voltage control is shown below.

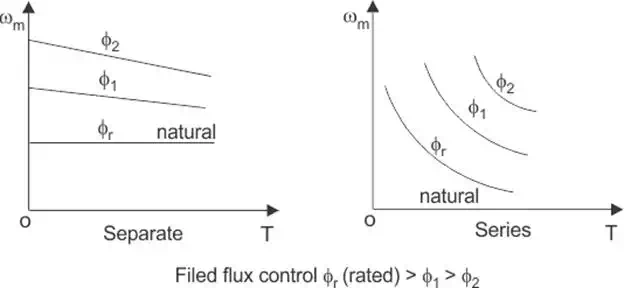
When speed control is required above the rated speed, field flux control is used.
Normally in ordinary machines, the maximum speed can be allowed up to twice of
the rated speed and for specially designed machines this can be allowed up to
six times of the rated speed. The torque speed characteristics for field flux
control are shown in the figure below.
How the armature voltage control and field flux control is made to operate
below and above the rated speed is shown in the figure below.
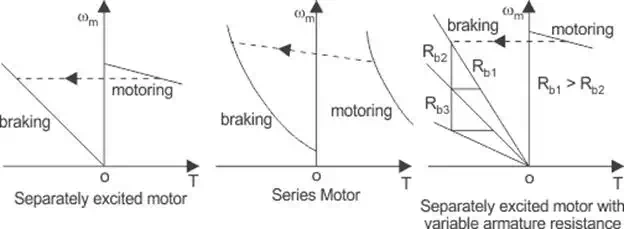
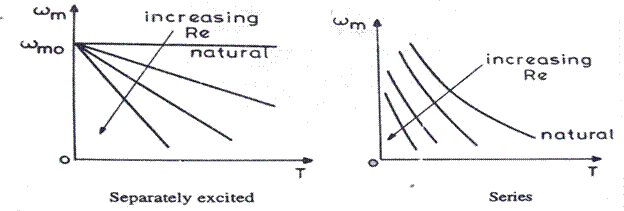
Now, finally coming to resistance control method. Here speed is varied by
wasting power in an external resistor that is connected in series with the armature. This method
is not used very much because it is an inefficient method of controlling speed
and it is only used in the places where the speed control time forms only a
fraction of the total running time, such as traction. The speed torque curve of
DC motor drives is given below.
So, the application and types of DC motor drives have been discussed very
easily.