The
Mathematical Link Between Gears in a Gear
Train
|
Previously
we analyzed the angular relationship
between the Force and Distance vectors in this simple gear
train. here we’ll discuss
about commonality between the two gears in this train which will
later enable us to develop individual torque calculations for them.
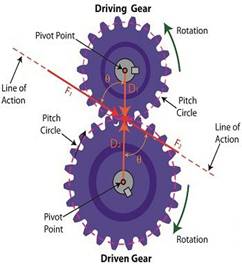
From
the illustration it’s clear that the driving gear is mechanically linked to
the driven gear by their teeth. Because they’re linked,
force, and hence torque, is transmitted by way of the driving gear to the
driven gear. Knowing this we can develop a mathematical
equation to link the driving gear Force vector F1 to the
driven gear Force vector F2, then use that linking equation to
develop a separate torque formula for each of the gears in the train. We
learned in the previous topic in this series that F1 and F2 travel
in opposite directions to each other along the same line of
action. As such, both of these Force vectors are situated in
the same way so that they are each at an angle value ϴ with respect to
their Distance vectors D1 and D2. This
fact allows us to build an equation with like terms, and that in turn allows
us to use trigonometry to link the two force vectors into a single equation: F =
[F1 × sin(ϴ)] – [F2 × sin(ϴ)] where F
is called a resultant Force vector, so named because it represents the force
that results when the dead, or inert, weight that’s present in the resisting
force F2 cancels out some of
the positive force of F1. Next
topic we’ll simplify our gear train illustration and delve into more math in
order to develop separate torque computations for each gear in the train. |