Incremental vs Absolute Encoders
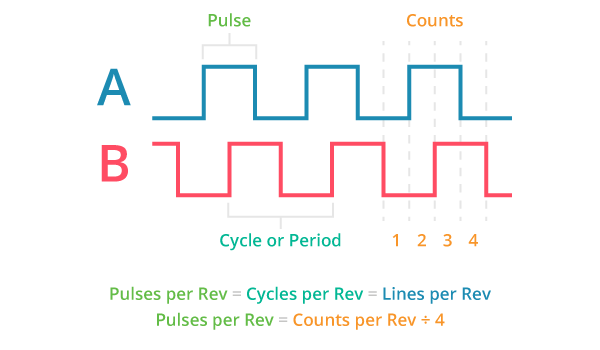
To understand the importance of absolute encoders it is good to first understand the limitations of incremental encoders. This image shows how an incremental encoder uses quadrature output signals to convey position information. In incremental encoders, there are 4 distinct states, and those 4 states are repeated over the rotation of the encoder for however many increments/counts/pulses the encoder has. Since there are only 4 states, the host cannot determine the encoder's exact radial position without a reference. Many incremental encoders include an index signal which occurs once per rotation and can be used as a home location to count from.
This output is useful for obtaining speed information, direction of travel, and can be used to count up or down from the index position. However, this type of encoder is not useful when the host system must know the current position immediately after power on. An incremental encoder can give precise radial position, but only after physically rotating to the index location.
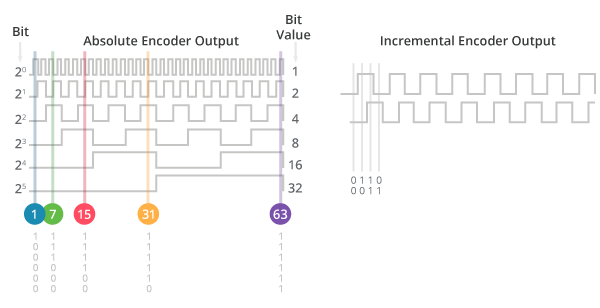
Unlike quadrature encoders that repeat the same 4 states over a revolution, absolute encoders generate a unique digital ‘word' for each position in its stated resolution. Because many absolute encoders are digital devices, resolution is expressed as an exponent of 2, otherwise known as binary. The numbers on the right of the absolute output illustration represent the numeric value of the bit when it is ‘on' or ‘high'. A 6 bit (26) absolute encoder can generate 64 unique, digital ‘words' that represent 64 positions over one revolution. Five positions are illustrated above. At the blue line, only the 20 bit is high, so the output is 1. At the green line, the 20, 21 and 22 bits are high: 1+2+4=7.