RESOLVER CONTROL TRANSFORMER
A resolver control transformer has two input stator windings, the SIN and COS windings and one rotor output winding. (See figure 1.3) The rotor output is proportional to the sine of the angular difference between the electrical input angle of the inputs and the mechanical angular position of its shaft...in other words, the voltage induced into the rotor is proportional to sin(![]() ), where
), where ![]() is measured from some reference shaft position called zero.
is measured from some reference shaft position called zero.
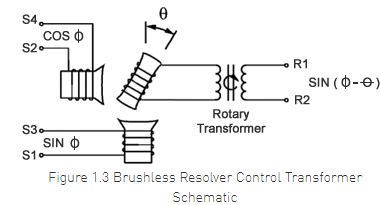
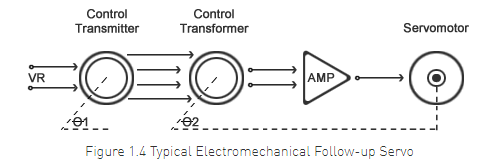
Figure 1.4 shows what might be called the "classic" resolver mechanical follow-up servomechanism. The command angle is established by the shaft position of the control transmitter. When the servomotor has reached the commanded position, |
|
|
Both control transmitters and control transformers are unidirectional devices i.e. Control transmitters manufacturers specifications are only valid when the electrical input is the rotor, and control transformers specifications are only valid when the electrical inputs are the stator. Although both can be used "backwards", performance cannot be guaranteed. |