Inertial Navigation
The Principles
The original meaning of the word navigation is “ship driving.” In ancient times when sailing boats were used, navigation was a process of steering the ship in accordance with some means of directional information, and adjusting the sails to control the speed of the boat. The objective was to bring the vessel from location A to location B safely. At present, navigation is a combination of science and technology. No longer is the term limited to the control of a ship on the sea surface; it is applied to land, air, sea surface, underwater, and space.
The concept of inertial-navigator mechanization was first suggested by Schuler in Germany in 1923. His suggested navigation system was based on an Earth-radius pendulum. However, the first inertial guidance system based on acceleration was suggested by Boykow in 1938. The German A-4 rocket, toward the end of World War II, used an inertial guidance system based on flight-instrument type gyroscopes for attitude control and stabilization. In this system, body-mounted gyro-pendulum-integrating accelerometers were used to determine the velocity along the trajectory. The first fully operational inertial auto-navigator system in the U.S. was the XN-1 developed in 1950 to guide C-47 rocket. Presently, inertial navigation systems are well developed theoretically and technologically. They find diverse applications,
allowing the choice of appropriate navigation devices, depending on cost, accuracy, human interface, global coverage, time delay, autonomy, etc.
Inertial navigation is a technique using a self-contained system to measure a vehicle’s movement and determine how far it has moved from its starting point. Acceleration is a vector quantity involving magnitude and direction. A single accelerometer measures magnitude but not direction. Typically, it measures the component of acceleration along a predetermined line or direction. The direction information is usually supplied by gyroscopes that provide a reference frame for the accelerometers. Unlike other positional methods that rely on external references, an inertial navigation system (INS) is compact and self-contained, as it is not required to communicate to any other stations or other references. This property enables the craft to navigate in an unknown territory.
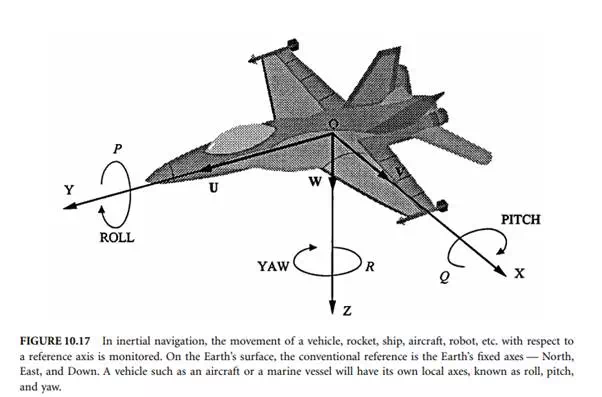
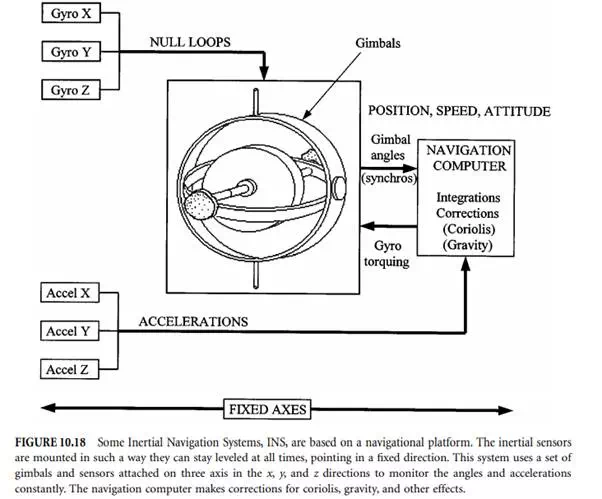
Inertial navigation can be described as a process of directing the movement of a vehicle, rocket, ship, aircraft, robot, etc., from one point to another with respect to a reference axis. The vehicle’s current position can be determined from “dead reckoning” with respect to a known initial starting reference position. On the Earth’s surface, the conventional reference will be North, East, and Down. This is referred to as the Earth’s fixed axes. A vehicle such as an aircraft or a marine vessel will have its own local axes: roll, pitch, and yaw, as shown in Figure 10.17. The inertial sensors of the INS can be mounted in such a way that they stay levelled and pointing in a fixed direction. This system relies on a set of gimbals and sensors attached on three axes to monitor the angles at all times. This type of INS is based on a navigational platform. A sketch of a three-axis platform is shown in Figure 10.18. Another type of INS is the strapdown system that eliminates the use of gimbals. In this case, the gyros and accelerometers are mounted to the structure of the vehicle. The measurements received are made in reference to the local axes of roll, pitch, and yaw. The gyros measure the movement of angles in the three axes in a short time interval (e.g., 100 samples per second). The computer then uses this information to resolve the accelerometer outputs into the navigation axes. A schematic block diagram of the strapdown system is shown in Figure 10.19.
The controlling action is based on the sensing components of acceleration of the vehicle in known spatial directions, by instruments which mechanize Newtonian laws of motion. The first and second integration of the sensed acceleration determine velocity and position, respectively. A typical INS includes
a set of gyros, a set of accelerometers, and appropriate signal processing units. Although the principle of the systems may be simple, the fabrication of a practical system demands a sophisticated technological base. The system accuracy is independent of altitude, terrain, and other physical variables, but is limited almost purely by the accuracy of its own components. Traditional INSs mainly relied on mechanical gyros and accelerometers, but today there are many different types available, such as optical gyroscopes, piezoelectric vibrating gyroscopes, active and passive resonating gyroscopes, etc. Also, micromachined gyroscopes and accelerometers are making an important impact on modern inertia navigation systems. A brief description and operational principles of gyroscopes and accelerometers suitable for inertial navigation are given below.
Major advances in INS over the years include the development of the electrostatic gyro (ESG) and the laser gyro. In ESG, the rotor spins at a speed above 200 × 103 rpm in a near-vacuum environment. The rotor is suspended by an electrostatic field; thus, it is free from bearing friction and other random torques due to mechanical supports. Hence, its operation results in a superior performance compared to others, closely resembling the performance of a theoretical gyro. Although no system can claim to reach perfection, an ESG requires less frequent updates as compared to other mechanical gyros.