Automatic Assembly And Robots
Feedback control systems are used extensively in industrial applications. Thousands of industrial and laboratory robots are currently in use. Manipulators can pick up objects weighing hundreds of pounds and position them with an accuracy of one tenth of an inch or better. Automatic handling equipment for home, school, and industry is particularly useful for hazardous, repetitious, dull, or simple tasks. Machines that automatically load and unload, cut, weld, or cast are used by industry to obtain accuracy, safety, economy, and productivity. The use of computers integrated with machines that perform tasks like a human worker has been foreseen by several authors. In his famous 1923 play, entitled R.U.R. [48], Karel Capek called artificial workers robots, deriving the word from the Czech noun robota, meaning “work.”
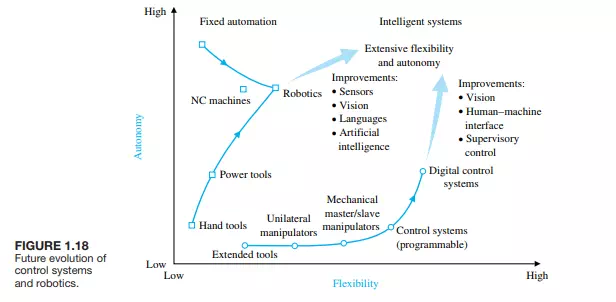
As stated earlier, robots are programmable computers integrated with machines, and they often substitute for human labor in specific repeated tasks. Some devices even have anthropomorphic mechanisms, including what we might recognize as mechanical arms, wrists, and hands. An example of an anthropomorphic robot is shown in Figure 1.17.
The Future Evolution Of Control Systems
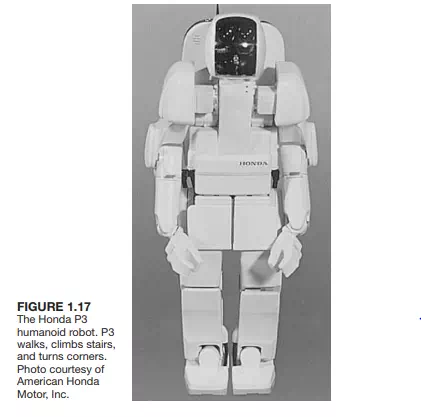
The continuing goal of control systems is to provide extensive flexibility and a high level of autonomy. Two system concepts are approaching this goal by different evolutionary pathways, as illustrated in Figure 1.18.Today’s industrial robot is perceived as quite autonomous—once it is programmed, further intervention is not normally required. Because of sensory limitations, these robotic systems have limited flexibility in adapting to work environment changes, which is the motivation of computer vision research. The control system is very adaptable, but it relies on human supervision. Advanced robotic systems are striving for task adaptability through enhanced sensory feedback. Research areas concentrating on artificial intelligence, sensor integration, computer vision, and off-line CAD/CAM programming will make systems more universal and economical. Control systems are moving toward autonomous operation as an enhancement to human control. Research in supervisory control, human–machine interface methods to reduce operator burden, and computer database management is intended to improve operator efficiency. Many research activities are common to robotics and control systems and are aimed toward reducing implementation cost and expanding the realm of application. These include improved communication methods and advanced programming languages.