Examples Of Modern Control Systems
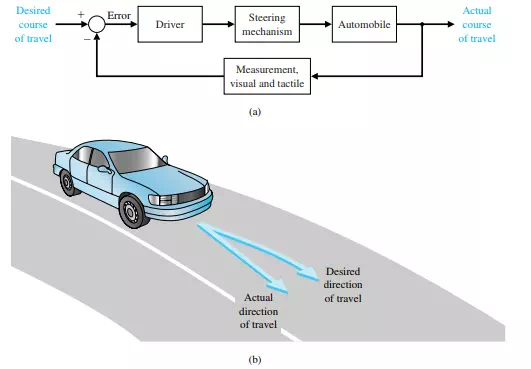
Feedback control is a fundamental fact of modern industry and society. Driving an automobile is a pleasant task when the auto responds rapidly to the driver’s commands. Many cars have power steering and brakes, which utilize hydraulic amplifiers for amplification of the force to the brakes or the steering wheel. A simple block diagram of an automobile steering control system is shown in Figure 1.8(a).The desired course is compared with a measurement of the actual course in order to generate a measure of the error, as shown in Figure 1.8(b).This measurement is obtained by visual and tactile (body movement) feedback. There is an additional feedback from the feel of the steering wheel by the hand (sensor). This feedback system is a familiar version of the steering control system in an ocean liner or the flight controls in a large airplane. A typical direction-of-travel response is shown in Figure 1.8(c).
Control systems operate in a closed-loop sequence, as shown in Figure 1.9. With an accurate sensor, the measured output is equal to the actual output of the system. The difference between the desired output and the actual output is equal to the error, which is then adjusted by the control device (such as an amplifier).The output of the control device causes the actuator to modulate the process in order to reduce the error. The sequence is such, for instance, that if a ship is heading incorrectly to
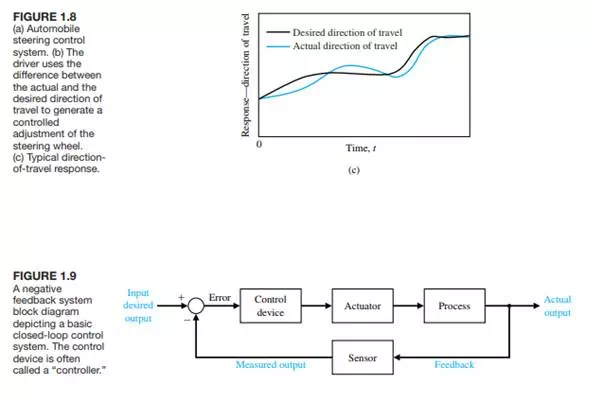
the right, the rudder is actuated to direct the ship to the left. The system shown in Figure 1.9 is a negative feedback control system, because the output is subtracted from the input and the difference is used as the input signal to the power amplifier.
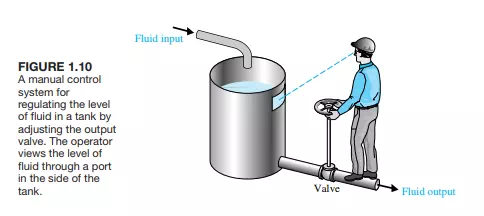
A basic, manually controlled closed-loop system for regulating the level of fluid in a tank is shown in Figure 1.10. The input is a reference level of fluid that the operator is instructed to maintain. (This reference is memorized by the operator.) The power amplifier is the operator, and the sensor is visual. The operator compares the actual level with the desired level and opens or closes the valve (actuator), adjusting the fluid flow out, to maintain the desired level.
Other familiar control systems have the same basic elements as the system shown in Figure 1.9. A refrigerator has a temperature setting or desired temperature, a thermostat to measure the actual temperature and the error, and a compressor motor for power amplification. Other examples in the home are the oven, furnace, and water heater. In industry, there are speed controls; process temperature and pressure controls; and position, thickness, composition, and quality controls, among many others.
In its modern usage, automation can be defined as a technology that uses programmed commands to operate a given process, combined with feedback of information to determine that the commands have been properly executed. Automation is often used for processes that were previously operated by humans. When automated, the process can operate without human assistance or interference. In fact, most automated systems are capable of performing their functions with greater accuracy and precision, and in less time, than humans are able to do. A semiautomated process is one that incorporates both humans and robots. For instance, many automobile assembly line operations require cooperation between a human operator and an intelligent robot.
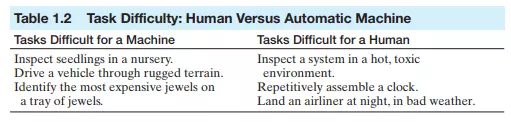
A robot is a computer-controlled machine and involves technology closely associated with automation. Industrial robotics can be defined as a particular field of automation in which the automated machine (that is, the robot) is designed to substitute for human labor. Thus robots possess certain humanlike characteristics. Today, the most common humanlike characteristic is a mechanical manipulator that is patterned somewhat after the human arm and wrist. We recognize that the automatic machine is well suited to some tasks, as noted in Table 1.2, and that other tasks are best carried out by humans.
Another very important
application of control technology is in the control of the modern automobile.
Control systems for suspension, steering, and engine control have been
introduced. Many new autos have a four-wheel-steering system, as well as an
antiskid control system.
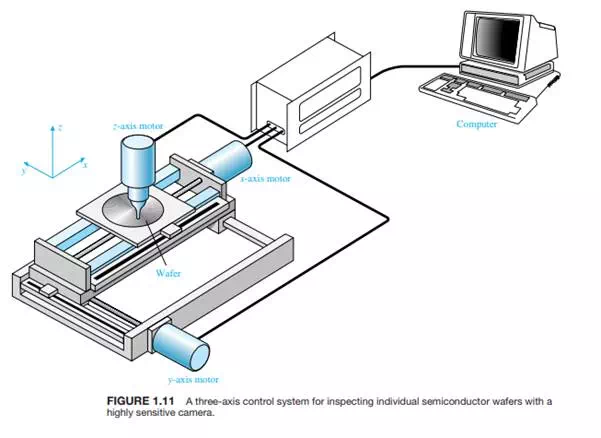
A three-axis control system for inspecting individual semiconductor wafers is
shown in Figure 1.11. This system uses a specific motor to drive each axis to
the desired position in the x-y-z-axis, respectively. The goal is to achieve smooth,
accurate movement in each axis. This control system is an important one for the
semiconductor manufacturing industry.
There has been considerable discussion recently concerning the gap between practice and theory in control engineering. However, it is natural that theory precedes
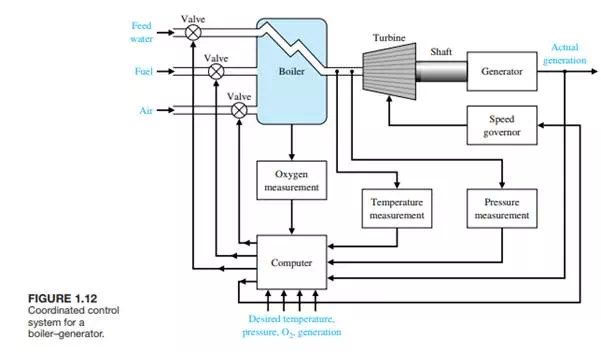
the applications in many fields of control engineering. Nonetheless, it is interesting to note that in the electric power industry, the largest industry in the United States, the gap is relatively insignificant.The electric power industry is primarily interested in energy conversion, control, and distribution. It is critical that computer control be increasingly applied to the power industry in order to improve the efficient use of energy resources. Also, the control of power plants for minimum waste emission has become increasingly important. The modern, large-capacity plants, which exceed several hundred megawatts, require automatic control systems that account for the interrelationship of the process variables and optimum power production. It is common to have as many as 90 or more manipulated variables under coordinated control. A simplified model showing several of the important control variables of a large boiler– generator system is shown in Figure 1.12.This is an example of the importance of measuring many variables, such as pressure and oxygen, to provide information to the computer for control calculations. It is estimated that more than 400,000 computer control systems have been installed in the United States [14, 16, 36, 39].The diagram of a computer control system is shown in Figure 1.13; note that the computer is the

control device. The electric power industry has utilized the modern aspects of control engineering for significant and interesting applications. It appears that in the process industry, the factor that maintains the applications gap is the lack of instrumentation to measure all the important process variables, including the quality and composition of the product.As these instruments become available, the applications of modern control theory to industrial systems should increase measurably.
Another important industry, the metallurgical industry, has had considerable success in automatically controlling its processes. In fact, in many cases, the control applications are beyond the theory. For example, a hot-strip steel mill, which involves a $100-million investment, is controlled for temperature, strip width, thickness, and quality.
Rapidly rising energy costs coupled with threats of energy curtailment are resulting in new efforts for efficient automatic energy management. Computer controls are used to control energy use in industry and to stabilize and connect loads evenly to gain fuel economy.
There has been considerable interest recently in applying the feedback control concepts to automatic warehousing and inventory control. Furthermore, automatic control of agricultural systems (farms) is meeting increased interest. Automatically controlled silos and tractors have been developed and tested. Automatic control of wind turbine generators, solar heating and cooling, and automobile engine performance are important modern examples.
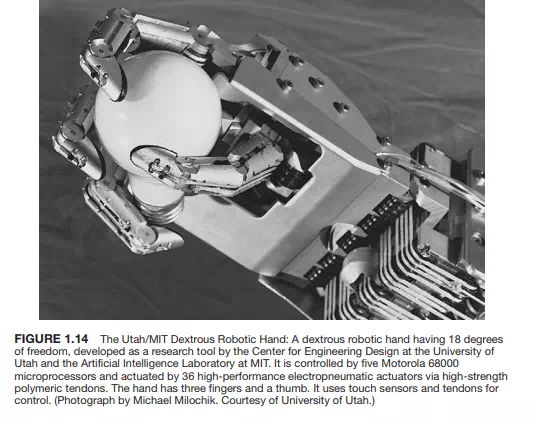
Also, there have been many applications of control system theory to biomedical experimentation, diagnosis, prosthetics, and biological control systems [22, 23, 51]. The control systems under consideration range from the cellular level to the central nervous system and include temperature regulation and neurological, respiratory, and cardiovascular control. Most physiological control systems are closed-loop systems. However, we find not one controller but rather control loop within control loop, forming a hierarchy of systems. The modeling of the structure of biological processes confronts the analyst with a high-order model and a complex structure. Prosthetic devices that aid the 46 million handicapped individuals in the United States are designed to provide automatically controlled aids to the disabled. An artificial hand that uses force feedback signals and is controlled by the amputee’s bioelectric control signals, which are called electromyographic signals, is shown in Figure 1.14.
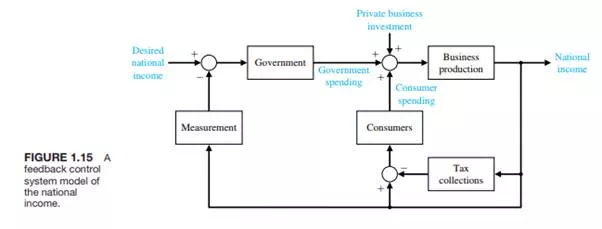
Finally, it has become interesting and valuable to attempt to model the feedback processes prevalent in the social, economic, and political spheres. This approach is undeveloped at present but appears to have a reasonable future. Society, of course, is composed of many feedback systems and regulatory bodies, such as the Interstate Commerce Commission and the Federal Reserve Board, which are controllers exerting the forces on society necessary to maintain a desired output. A simple lumped model of the national income feedback control system is shown in Figure 1.15. This type of model helps the analyst to understand the effects of government control—granted its existence—and the dynamic effects of government spending. Of course, many other loops not shown also exist, since, theoretically, government spending cannot exceed the tax collected without generating a deficit, which is itself a control loop containing the Internal Revenue Service and the Congress. Of course, in a socialist country, the loop due to consumers is de-emphasized and government control is emphasized. In that case, the measurement block must be accurate and must respond rapidly; both are very difficult characteristics to realize from a bureaucratic system. This type of political or social feedback model, while usually nonrigorous, does impart information and understanding

The ongoing area of research and development of unmanned aerial vehicles (UAVs) is full of potential for the application of control systems. An example of a UAV is shown in Figure 1.16. UAVs are unmanned, and to a large extent, do not yet operate autonomously. Their inability to provide the level of safety of a manned plane keeps them from flying freely in the commercial airspace. Generally, the UAV is controlled by ground operators. One significant challenge is to develop control systems which will avoid in-air collisions. Ultimately, the goal is to employ the UAV autonomously in settings such as aerial photography to assist in disaster mitigation, survey work to assist in construction projects, crop monitoring, and continuous weather monitoring. In a military setting, UAVs can perform intelligence, surveillance, and reconnaissance missions [83]. Smart unmanned aircraft will require significant deployment of advanced control systems throughout the airframe.