Introduction
Engineering is concerned with understanding and controlling the materials and forces of nature for the benefit of humankind. Control system engineers are concerned with understanding and controlling segments of their environment, often called systems, to provide useful economic products for society. The twin goals of understanding and controlling are complementary because effective systems control requires that the systems be understood and modeled. Furthermore, control engineering must often consider the control of poorly understood systems such as chemical process systems. The present challenge to control engineers is the modeling and control of modern, complex, interrelated systems such as traffic control systems, chemical processes, and robotic systems. Simultaneously, the fortunate engineer has the opportunity to control many useful and interesting industrial automation systems. Perhaps the most characteristic quality of control engineering is the opportunity to control machines and industrial and economic processes for the benefit of society.
Control engineering is based on the foundations of feedback theory and linear system analysis, and it integrates the concepts of network theory and communication theory. Therefore control engineering is not limited to any engineering discipline but is equally applicable to aeronautical, chemical, mechanical, environmental, civil, and electrical engineering. For example, a control system often includes electrical, mechanical, and chemical components. Furthermore, as the understanding of the dynamics of business, social, and political systems increases, the ability to control these systems will also increase.
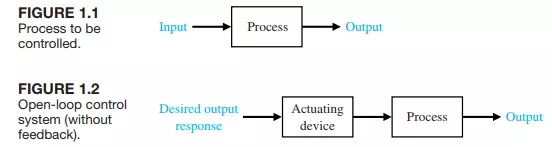
A control system is an interconnection of components forming a system configuration that will provide a desired system response. The basis for analysis of a system is the foundation provided by linear system theory, which assumes a cause–effect relationship for the components of a system.Therefore a component or process to be controlled can be represented by a block, as shown in Figure 1.1. The input–output relationship represents the cause-and-effect relationship of the process, which in turn represents a processing of the input signal to provide an output signal variable, often with a power amplification.
An open-loop control system utilizes a controller or control actuator to obtain the desired response, as shown in Figure 1.2. An open-loop system is a system without feedback.

In contrast to an open-loop control system, a closed-loop control system utilizes an additional measure of the actual output to compare the actual output with the desired output response. The measure of the output is called the feedback signal. A simple closed-loop feedback control system is shown in Figure 1.3. A feedback control system is a control system that tends to maintain a prescribed relationship of one system variable to another by comparing functions of these variables and using the difference as a means of control.
A feedback control system often uses a function of a prescribed relationship between the output and reference input to control the process. Often the difference between the output of the process under control and the reference input is amplified and used to control the process so that the difference is continually reduced. The feedback concept has been the foundation for control system analysis and design.
A closed-loop control system uses a measurement of the output and feedback of this signal to compare it with the desired output (reference or command).
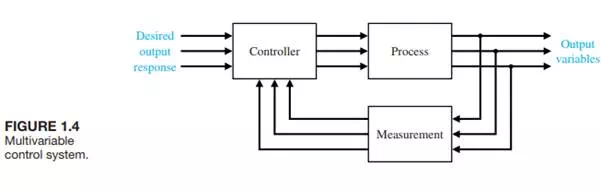
Due to the increasing complexity of the system under control and the interest in achieving optimum performance, the importance of control system engineering has grown in the past decade. Furthermore, as the systems become more complex, the interrelationship of many controlled variables must be considered in the control scheme. A block diagram depicting a multivariable control system is shown in Figure 1.4.
A common example of an open-loop control system is an electric toaster in the kitchen. An example of a closed-loop control system is a person steering an automobile (assuming his or her eyes are open) by looking at the auto’s location on the road and making the appropriate adjustments.
The introduction of feedback enables us to control a desired output and can improve accuracy, but it requires attention to the issue of stability of response.