Control of Active Power and Frequency
Since the stored energy in the system is relatively small, the constant of inertia for a typical generator is ≈ 4 s, the electrical energy must be produced in the same moment as it is consumed by the loads. Since the load varies, a certain power reserve must constantly be available. In addition for the daily variation, see Figure 14.1, there are continuously spontaneous load variations up to ≈ 2 % of the total load during a minute. The generation reserves are generally divided into different groups according to their properties: spinning, supplementary and back-up, see Figure 14.2. The reserves are at operation planning divided into normal operation and disturbance reserve after the cause of the needed reserve. At the operation planning of the power system forecasts over the expected load are carried out continuously. Forecasted values can never ex-
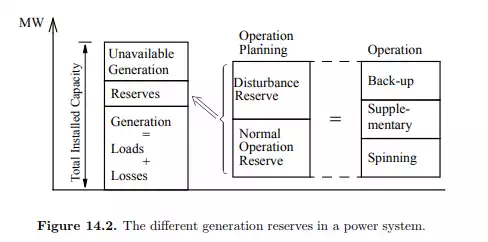
actly coincide with real values, therefore a reserve which can compensate the difference is required. Therefore frequency variations arise, which must be compensated for. Both power imbalances due to incorrect load forecasts and to occasional load variations are controlled with the normal operation reserve. Events which can lead to utilisation of the disturbance reserve are: generator trips or line trips. Disturbances of that kind can lead to frequency reductions and reserves must often be put into operation. In the operation the reserves are divided after needed time for activation, see Figure 14.2. To keep reserves is expensive and therefore it is of interest to minimise the needed effort of the reserves for maintaining the wanted reliability and security.
Spinning reserve
The spinning reserve is co-ordinated in the Nordic system and is above all located in hydro units with turbine control, see Figure 14.3. The turbine control is activated within some seconds if the frequency deviates from the normal and changes then the turbine setting for the regulating generators by changing the guide vane opening to the turbines. When the system frequency is changed the power demand of certain loads is also changed, specially for motors, in such a way that a frequency increase leads to increased power consumption and a frequency decrease gives lower power consumption. This frequency dependence of the load stabilises the frequency. Components for heat- and light production are fairly insensitive to frequency variations. The resulting change in active power, ∆P, at a frequency change
in the system is: ∆P = ∆Pg − ∆Pl (14.1) where: ∆Pg = the total change in output power from the generators par-
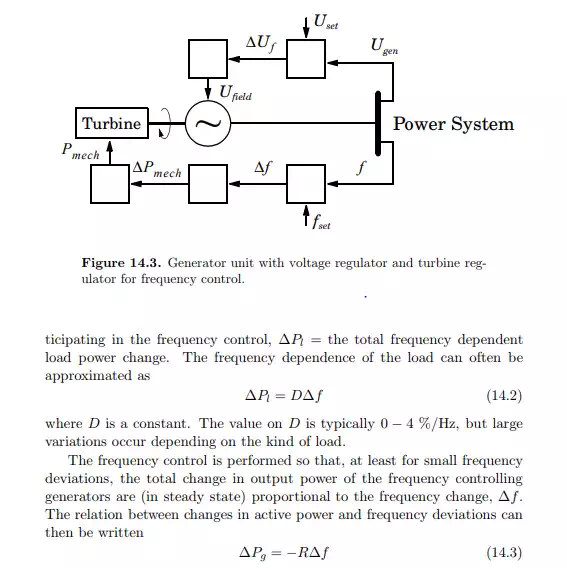
The constant R is determined by the setting of the turbine control of the frequency controlling generators, and is named the systems frequency regulation constant or frequency droop and is normally given in MW/Hz. The frequency regulation for a system is established so that the frequency does not fall outside given limits at certain dimensional disturbances which can occur, e.g. trip of the largest generator in the system. It shall be noted that the variation of frequency, computed from the above relations, are the steady state values which are obtained after the frequency controllers have responded. The transient frequency deviation during the process following a large disturbance can be considerably larger than the stationary one, up to some Hz. In Figure 14.4 it is shown how the frequency can vary after a disturbance in the system. As seen the maximal frequency deviation is considerably greater than the stationary
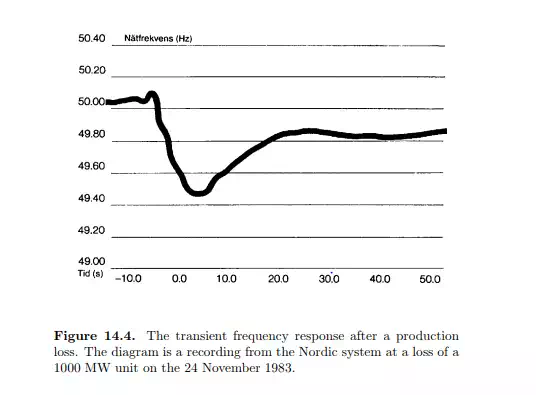
one. The transient behaviour of the frequency is highly dependent on the characteristics of the turbine regulators of the generators, and in this respect the hydro turbines and steam turbines are totally different. Shortly it can be said that the transient frequency deviation is considerably larger if the frequency control is performed by hydro power. This is due to that the hydro turbine is a non-minimum-phase system.