SUPERVISORY CONTROL AND DATA ACQUISITION (SCADA)
· There are two parts to the term SCADA Supervisory control indicates that the operator, residing in the energy control center (ECC), has the ability to control remote equipment.
· Data acquisition indicates that information is gathered characterizing the state of the remote equipment and sent to the ECC for monitoring purposes.
· The monitoring equipment is normally located in the substations and is consolidated in what is known as the remote terminal unit (RTU).
· Generally, the RTUs are equipped with microprocessors having memory and logic capability. Older RTUs are equipped with modems to provide the communication link back to the ECC, whereas newer RTUs generally have intranet or internet capability.
· Relays located within the RTU, on command from the ECC, open or close selected control circuits to perform a supervisory action.
· Such actions may include, for example, opening or closing of a circuit breaker or switch, modifying a transformer tap setting, raising or lowering generator MW output or terminal voltage, switching in or out a shunt capacitor or inductor, and the starting or stopping of a synchronous condenser.
· Information gathered by the RTU and communicated to the ECC includes both analog information and status indicators.
· Analog information includes, for example, frequency, voltages, currents, and real and reactive power flows.
· Status indicators include alarm signals (over-temperature, low relay battery voltage, illegal entry) and whether switches and circuit breakers are open or closed.
· Such information is provided to the ECC through a periodic scan of all RTUs. A 2 second scan cycle is typical.
1. FUNCTIONS OF SCADA SYSTEMS
1. Data acquisition
2. Information display.
3. Supervisory Control (CBs:ON/OFF, Generator: stop/start, RAISE/LOWER command)
4. Information storage and result display.
5. Sequence of events acquisition.
6. Remote terminal unit processing.
7. General maintenance.
8. Runtime status verification.
9. Economic modeling.
10. Remote start/stop.
11. Load matching based on economics.
12. Load shedding.
2. CONTROL FUNCTIONS
· Cont rol and monitoring of switching devices, tapped transformers, auxiliary devices, etc.
· Bay-and a station-wide interlocking
· Dynamic Bus bar coloring according to their actual operational status.
· Automatic switching sequences
· Automatic functions such as load shedding, power restoration, and high speed bus bar transfer
· Time synchronization by radio and satellite clock signal
3. MONITORING FUNCTIONS:
· Measurement and displaying of current, voltage, frequency, active and reactive power, energy, temperature, etc.
§ Alarm functions. Storage and evaluation of time stamped events.
§ Trends and archiving of measurements
§ Collection and evaluation of maintenance data
§ Disturbance recording and evaluation
4. PROTECTION FUNCTIONS:
· Substation protection functions includes the monitoring of events like start, trip indication and relay operating time and setting and reading of relay parameters.
· Protection of bus bars. Line feeders, transformers, generators.
· Protection monitoring (status, events, measurements, parameters, recorders)
· Adaptive protection by switch-over of the active parameter set.
5. COMMUNICATION TECHNOLOGIES
· The form of communication required for SCADA is telemetry. Telemetry is the measurement of a quantity in such a way so as to allow interpretation of that measurement at a distance from the primary detector.
· The distinctive feature of telemetry is the nature of the translating means, which includes provision for converting the measure into a representative quantity of another kind that can be transmitted conveniently for measurement at a distance.
· The actual distance is irrelevant.
· Telemetry may be analog or digital. In analog telemetry, a voltage, current, or frequency proportional to the quantity being measured is developed and transmitted on a
· communication channel to the receiving location, where the received signal is applied to a meter calibrated to indicate the quantity being measured, or it is applied directly to a control device such as a ECC computer.
· Forms of analog telemetry include variable current, pulse-amplitude, pulse-length, and pulse-rate, with the latter two being the most common.
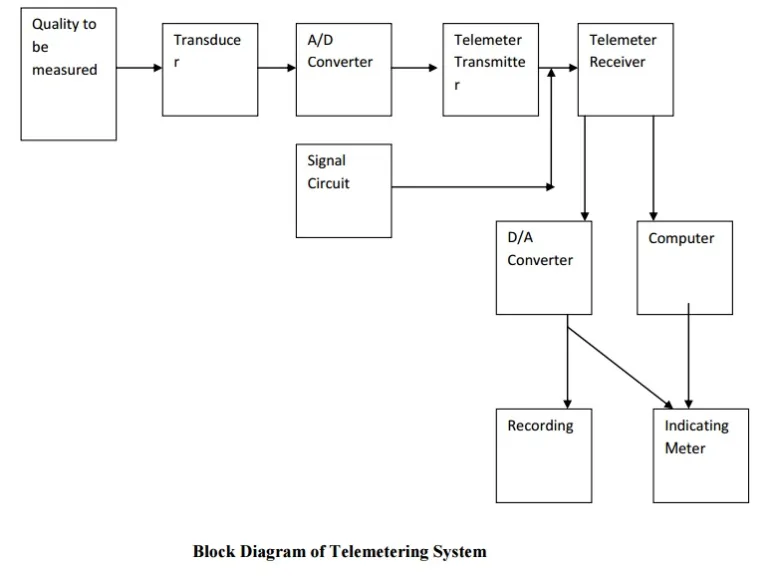
· In digital telemetry, the quantity being measured is converted to a code in which the sequence of pulses transmitted indicates the quantity.
· One of the advantages to digital telemetering is the fact that accuracy of data is not lost in transmitting the data from one location to another.
· Digital telemetry requires analog to digital (A/D) and possible digital to analog (D/A) converters, as illustrated.
· The earliest form of signal circuit used for SCADA telemetry consisted of twisted pair wires; although simple and economic for short distances, it suffers from reliability problems due to breakage, water ingress, and ground potential risk during faults
· Improvements over twisted pair wires came in the form of what is now the most
· common, traditional type of telemetry mediums based on leased-wire, power-line carrier, or microwave.
· These are voice grade forms of telemetry, meaning they represent communication channels suitable for the transmission of speech, either digital or analog, generally with a frequency range of about 300 to 3000 Hz.