Modelling the
Pulse-Width Modulator
Pulse-width
modulation can be of many forms. A PWM signal of constant frequency can be
obtained by comparing the ramp signal (or carrier signal) with the error
between the desired and the actual output voltage signal (Vc,
compensator voltage signal).
Recommended Level
Beginner
Pulse-Width Waveform Generation and
Analysis of Important Parameters in Modelling PWM
Pulse-width modulation can be
of many forms. A PWM signal of constant frequency can be obtained by comparing
the ramp signal (or carrier signal) with the error between the
desired and the actual output voltage signal (VC ,compensator voltage signal).
Mathematically, PWM output is
δ(t) = sign (Vr (t) - VC (t)) [Equation 1]
where:
Vr is the ramp waveform generator output.
VC is the the compensator
voltage.
Sign
is a sign function which gives the binary output depending upon the difference
between Vr and VC.
δ(t) have the positive value when ramp voltage Vr is greater than VC , otherwise it is zero as shown in Fig. 2 and Fig. 3.
Vr is the reference or carrier signal
which can be a sawtooth, inverted sawtooth and triangular wave. Here, we have considered
the sawtooth or ramp signal for the
analysis.
A typical voltage mode
control pulse-width modulator block diagram is shown in Fig.1
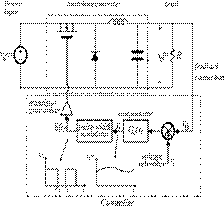
Figure 1.
Voltage Mode Control PWM Modulator
Peak amplitude of the ramp
wave is VP. A comparator compares the output
voltage VO and ramp voltage Vrto generate the switching variable δ(t)
as shown in Fig. 2 and Fig. 3. There are two cases shown for generating the
signal δ(t) depending upon the switching
instance at the start or end of the cycle.
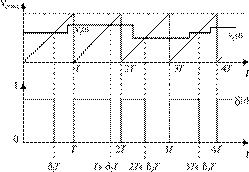
Figure 2. PWM
Waveform Generation with Turning-On at the Start of Cycle
From Fig. 2, ramp signal is
represented by the equation:
Vr(t)=VcmaxtTVr(t)=VcmaxtT
δc can be obtained at the intersection of Vr and VC ,
thus,
Vr(δcT)=VcmaxδcTT=VCVr(δcT)=VcmaxδcTT=VC
⇒δc=VCVcmax⇒δc=VCVcmax
Where c = 0, 1, 2,….. n [Equation 2]
Therefore, the gain of the
compensator is
GC=δcVC=1Vcmax.GC=δcVC=1Vcmax.
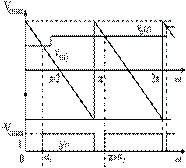
Figure 3. PWM
Waveform Generation with Turning-Off at the End of Cycle
From Fig. 3, we need to find
out the value of switching angle i.e. αc where c = 0, 1, 2…..n.
Here, ramp signal can be
expressed as:
Vr(t)=Vcmax−2VcmaxwtπVr(t)=Vcmax−2Vcmaxwtπ
And error signal as:
VC(t)=Vcmax−2VcmaxαcπVC(t)=Vcmax−2Vcmaxαcπ
At the intersection point, VC = Vr
αc=π2(1−VCVcmax)αc=π2(1−VCVcmax)
[Equation 3]
Thus, the gain of the
compensator is
GC=dαcdVC=−π2Vcmax.GC=dαcdVC=−π2Vcmax.
After turning on and off any
variation in the compensator signal VC(t), the duty cycle δ(t) will be
affected after some delay. Let us say that the value of this delay is T/2.
Then the control transfer
function can be expressed
as,
δc(t)vc(t)=Gce−sT2=GC1+sT2+s22!(T2)2+…≈GC1+sT2δc(t)vc(t)=Gce−sT2=GC1+sT2+s22!(T2)2+…≈GC1+sT2
Clearly, this pole occurs at
the frequency which is double of the switching frequency. As the location for
frequency of the state-space average models is near about one decade of the
switching frequency, compensator pole can be neglected.
For DC-to-DC converter, PWM
reference signal (Vr) is of constant value and independent
of modulation technique employed for the steady state. For the dynamic purpose,
the reference signal can be considered to be the sum DC value corresponding to
the steady state and a sinusoidal signal signifying the small signal
perturbation.
Mathematically, it can be
written in general as,
Vr(t)=Vro+Vr1cos(2πf1t+∅1)Vr(t)=Vro+Vr1cos(2πf1t+∅1)
Where f1 is the frequency of the reference
signal.
Previously, LTI model that
characterizes the small signal behavior of
a converter is required for analysis and controller design. This model can be
developed for both constant frequency and variable frequency pulse-width
modulation. Here, we are going with the constant PWM.
Average duty ratio,
d=VroVcmaxd=VroVcmax
and
Modulation Index,
M=2Vr1VcmaxM=2Vr1Vcmax
The amplitude of the
perturbation
=Vr1Vcmax=M2=Vr1Vcmax=M2
An example of buck converter
is shown in Figure 4. If we alter the duty ratio slowly as compared to the
switching frequency, we will get a waveform whose average values change with
time. Thus, we need to do averaging for this case. The averaging time must be
greater than the switching time but less than the rate of change of the duty
cycle.
The duty ratio is altered to
get a load voltage having a DC component and a sinusoidal frequency, wa, whose value is lesser than the
switching frequency.
The modulated d(t) in that case can be represented
as,
d(t)=0.5+0.25sinwatd(t)=0.5+0.25sinwat
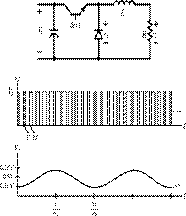
Figure 4. Buck
Converter with Modulated Duty Ratio
As we have studied earlier in
the cases of buck, boost and buck-boost converters, either switch or diode
conducts at a particular time in continuous conduction mode; and expressed
as
x˙=[A01δ(t)+A02(1−(δ(t))]x+[B01δ(t)+B02(1−δ(t))]ux˙=[A01δ(t)+A02(1−(δ(t))]x+[B01δ(t)+B02(1−δ(t))]u
But this model is not
acceptable to design linear control systems as it has a time-varying
function δ(t) which is multiplied by the
state variables. Thus, we have to deal with this time-varying problem with
averaging. The state-space averaging model obtained over a switching cycle will
be
x¯¯¯˙=[A01d+A02(1−d)]x¯¯¯+[B01d+B02(1−d)]u¯¯¯x¯˙=[A01d+A02(1−d)]x¯+[B01d+B02(1−d)]u¯
Similar equation can be
written for the output signal. Here, d is the algebraic
average of the duty cycle ratio over a complete cycle.
Consider that there is a
small disturbance in the controller compensator signal due to variation in the
output and the result in the duty cycle is shown by the block diagram below.
We now have,
VC(t)=VC+vˇc(t)VC(t)=VC+vˇc(t)
and
d(t)=D+dˇ(t)d(t)=D+dˇ(t)
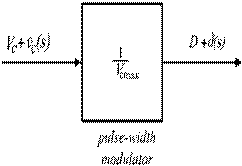
Figure 5. Block
Diagram of the PWM for the Perturbation Case
From Equation 2, we have the
following PWM equation for the linear ramp signal:
δc=d=VCVcmaxδc=d=VCVcmax
for 0
≤ VC (t) ≤ Vcmax
It is clear from this
equation that δc(t) is linearly dependent on the VC.
Including the small signal,
the final PWM equation
is,
D+d(t)=VC+vˇc(t)VcmaxD+d(t)=VC+vˇc(t)Vcmax
If we separate the
steady-state relation and the small-signal relation, we get the following
results:
D=VCVcmaxD=VCVcmax
and
dˇ(t)=vcˇ(t)Vcmaxdˇ(t)=vcˇ(t)Vcmax
In Fig. 5, the input signal
is continuous while the output has discrete values. Thus, a sampler with
sampling rate equal to the switching frequency is needed as shown in Fig. 6.
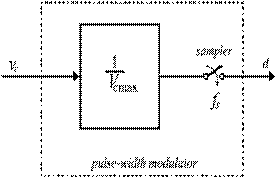
Figure 6. PWM
Modulator
This model is valid for
continuous conduction mode. In the case of discontinuous conduction, we have to
consider the three intervals of switching to form the final model.
In the case of the voltage
control methodology for the small-scale linear model, the ratio of the duty
ratio to the output voltage will be in the second order. Crossover frequency
for the voltage control loop must be lower than the resonant frequency to
ensure the stability of the system. Also, there exist a right-half plane zero
in this transfer function even at frequencies that are less than the resonant
frequency. Thus, this model is accurate only for frequencies much lower
than fs /
2 (Nyquist rate). This issue can be solved by the adding a current-loop control.