What Is LiDAR and How
Can I Use It?
LiDAR is the practice of
using light or non-visible (e.g., infrared) electromagnetic radiation to detect
and measure distance to objects. LiDAR stands for LIght Detection And Ranging.
You've probably heard of
LiDAR before, but you may not really know much about it. My goal in this
article is to explain on a conceptual level how LiDAR works.
Applications of LiDAR
LiDAR shows up in
documentaries and news articles fairly often because it plays a role in so many
scientific fields.
LiDAR is used in everything
from agriculture to meteorology, biology to robotics, and law enforcement to
solar photovoltaics deployment. You might see LiDAR referenced in reports about
astronomy and spaceflight or you might hear about its use in mining operations.
LiDAR can image small things
like historic relics for archaeology or skeletons for biology. On the other end
of the spectrum, LiDAR can also image very large things like landscapes for
agriculture and geology.
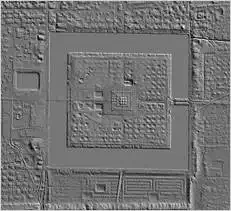
Aerial LiDAR image of Angkor Wat. Image
courtesy of Ancient Explorers.
Then you have LiDAR systems
that image moving objects or may be moving, themselves. These non-static
systems may become the most common form of LiDAR as they are used for machine
vision in military systems, survey aircraft, and prototype autonomous cars.
Yet other forms of LiDAR are
not used to image solid surfaces at all: NASA uses LiDAR in atmospheric
research while other LiDAR systems are designed to function and image surfaces
underwater.
Clearly, this technology is
quite flexible.
Similarities to SONAR and RADAR
So if LiDAR is LIght Detection And Ranging,
is it similar to SONAR (SOund Navigation And
Ranging) and RADAR (RAdio Detection And
Ranging)? Yes, sort of. To understand how the three are alike, let us start by
talking about how SONAR (echolocation) and RADAR work.
SONAR emits a powerful pulsed
sound wave of known frequency. Then, by timing how long it takes the pulse to return,
you can measure a distance. Doing this repeatedly can help you get a good
feeling for your surroundings.
SONAR imaging used to locate a sunken
vessel at sea. Image courtesy of the NOAA Office of
Exploration and Research.
The key element of SONAR is
the sound wave, but there are many different types of waves. If we use the same
principal and change the type of wave from a sound wave to an electromagnetic
wave (radio), you get RADAR (RAdio Detection And Ranging).
There are many different
types of RADAR that use different frequencies of the EM spectrum. Light is just
a special range of wavelengths detectable by the human eye, which is one of the
things that differentiates LiDAR from RADAR. There are other differences
between the two, but I'm going to focus on spatial resolution as the key
difference.
RADAR uses a large wavefront and long wavelengths, giving poor
resolution. By comparison, LiDAR uses lasers (tight wavefront)
and much shorter wavelengths. The wavelength directly dictates the resolving
power of an imaging system: Shorter wavelengths (corresponding to higher
frequencies) increase the resolving power.

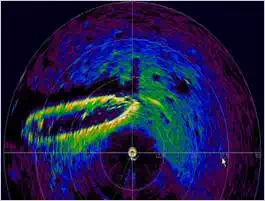
Weather RADAR imaging picking up the
movement of weather systems and migrating birds. Image courtesy of NASA.
And if your wavefront is huge, you have to wonder—what distance
are you measuring?
Imagine trying to use a
flashlight range finder for your next home improvement project. Is that
flashlight measuring the distance to that beam or the wall behind it? This is
too imprecise to be practical. Laser range finders, however, are much more
accurate.
Measuring with Pixels
LiDAR uses a laser to measure
distance, but that is not any different from a laser range finder—you point it
at something and you measure a distance. But what if that one distance
measurement were interpreted as a single pixel? You could then take numerous
distance measurements and lay them out in a grid; the result would be an image
that conveys depth, analogous to a black-and-white photograph in which the
pixels convey light intensity. Sounds pretty cool, and that could be pretty
useful right?
But we still have several
questions to answer before we can fully understand how this system works.
How many pixels do we need?
If we compare LiDAR to early
digital cameras, we would need one or two megapixels (or one to two millionpixels). So let's say we need two million
lasers, then we would need to measure the distance indicated by every one of
those lasers, so another two million sensors, and then circuits to do the
calculations.
Maybe a whole lot of lasers
at once is not the best method. What if, instead of trying to take a whole
"picture" at once, we did what scanners do? Namely, could we take
part of the picture and then move the pixel and take the picture again? This
sounds like a much simpler device that could be implemented with only one laser
and one detector. However, it also means that we cannot take an instant
"picture" the way we can with a camera.
How do we move our pixel?
In a scanner, the physical
pixel is moved along the image. But that would not be practical in many
situations, so we probably need a different method.
With LiDAR, we are trying to
take a "picture in depth", or you could say we are trying to take a
"3D model".
If you were paying attention
in your math classes, you may recall the Cartesian coordinate system (X,
Y, Z) and the spherical coordinate system (r,
theta, phi). I bring this up because, if we assume that the LiDAR is at the
origin in a spherical system, then we just need to know the horizontal angle
(theta), the vertical angle (phi), and the distance (r) to build our 3D model.
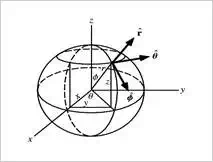
Representation of a spherical coordinate
system. Image courtesy of Wolfram MathWorld.
With only one source, the 3D
model would be a single surface. But if we combine multiple surfaces mapped
together, you can get a full 3D model. So we need one laser and one sensor to
make our image using the spherical coordinate system.
Some LiDAR systems are mobile
and use GPS or other positioning systems to map all the readings together into
a single image. These mobile systems still use the same principles but they may
be applied in different ways.
How do we actually change our laser's
angles quickly?
We have two million
"pixels" to measure. How can we possibly adjust our laser to measure
them all?
There are only 86,400 seconds
in a day, so working with any length of time over thousandths of a second to
measure and adjust is probably too long to be practical.
So how do they adjust the
pixel so fast? The key is that they never stop adjusting it, using a spinning
mirror or prism rotating at a very precise and well-known speed. The laser is
reflected off of that mirror or prism so that its position is constantly
changing but at a known rate. This makes it very fast and easy to adjust one of
our angles, either phi or theta, to scan across our image. For scanning the
other angle, we could use a much slower system such as a precision stepper motor.
But we still have one last
major problem to solve.
How do we measure the distance?
There are multiple methods of
measuring distance with a laser, depending on what the system is trying to
achieve. And a single system may be using multiple methods simultaneously to
increase accuracy. All methods require very precise equipment.
The simplest to understand is
time of flight (ToF). This is also most often listed
as the method used to measure distance with a laser. If you calculate the time
it takes for light to travel 2mm, the distance needed for 1mm resolution, you
get the time 6.67 picoseconds. That requires some very precise equipment to
measure, but can be done for a price.
Another method,
triangulation, uses a second spinning mirror
to redirect the receiver signal; by measuring the change in the angle, you can
get a distance. Triangulation may not be applicable for long distances, and the
use of the rotating mirror may complicate the system.
Finally, by modulating the
laser, it is possible to measure a phase shift in the laser modulation. Because
of the periodic nature of the modulation it cannot by itself be used to measure
the distance. Rather, it produces a list of possible distances that can be used
in addition to another method to increase the accuracy.

LiDAR rendering of a group of people.
Image courtesy of NASA.
The LiDAR Laser
One last thing to talk about:
the laser itself. Despite the name, most LiDAR systems employ infrared rather
than visible radiation.
Because electromagnetic
radiation's interaction with matter is governed by wavelength, some wavelengths
work better for certain applications. Someday microwave (maser) or x-ray (xaser) lasers could be used to build LiDAR systems that can
image through a wide variety of materials, greatly enhancing their usefulness.