An Intro to Adaptive
Echo Cancellers
This
article introduces a basic acoustic echo canceller based on the Least Mean
Squares (LMS) algorithm. Acoustic echo cancellers are necessary for many modern
communications products. I’m sure you’ve come across a time when you
could hear your voice while speaking on the phone, correct? Well, that's an
example of an acoustic echo. Acoustic echoes are a common problem that arise
from audio signals bouncing off nearby objects and coupling into the microphone
when the mic should only be picking up your voice or when directly coupling
from a speaker microphone pair (like your phone). Without cancelling these
effects, the communication system is pretty annoying to use!
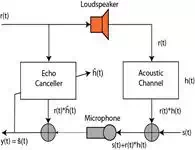
Figure 1
Here, the
speech signal from a loudspeaker is acoustically coupled into the microphone of
a speaker phone or hands-free cell phone, which is heard at the remote signal
source as a return echo. The echo is suppressed by an echo canceller at the
echo source by the system modeled in the
figure above. Assume the channel has the sampled data impulse response
represented by the Z-transform:
H(Z)=1+0.5Z−3+0.1Z−5H(Z)=1+0.5Z−3+0.1Z−5
and the echo canceller is a tapped delay
filter of length 50 samples. First we will let the desired signal s(t) be zero and train the canceling filter
with white noise. As a synopsis, the signals in the figure 1 are:
speech signal:s(t)speech signal:s(t)
echo:r(t)echo:r(t)
acoustic channel:h(t)acoustic channel:h(t)
acoustic channel output=r(t)∗h(t)(convolution)acoustic
channel output=r(t)∗h(t)(convolution)
microphone input:s(t)+r(t)∗h(t),desired
signal plus echo through acoustic channelmicrophone input:s(t)+r(t)∗h(t),desired signal plus echo through acoustic channel
echo canceller:h^(t)echo canceller:h^(t)
desired signal:y(t)desired signal:y(t)
The goal
is to match the acoustic channel with our echo canceller so that we can invert
the acoustic channels response and create only the desired signal at the
microphone inputs (t). So lets see how this
looks in Matlab code:
clear all;
clf;
close all;
%acoustic channel frequency response
num = [1 0 0 0.5 0 .1];
den = [1 0 0 0 0 0];
[Hc,Wc] = freqz(num,den);
%---BUILD FM SWEEP---%
fs = 2*pi;
tmax = 10000;
f1=0;
f2 = .5;
tsweep = 0:499;
slope = (f2-f1)/1000;
F = slope.*(mod(tsweep,500));
t = 0:1:tmax;
fm = cos(2*pi*slope*t);
F = slope.*(mod(tsweep,500));
fm2 = cos(2*pi*(F).*tsweep);
fm2c = repmat(fm2,20,1);
fm2 = reshape(fm2c',1,10000 );
figure
plot([0:999],fm2(2001:3000))
%subplot(212)
%plot([-512:511]*1/(2*pi), 20*log10(abs(fft(fm2(1:500),
1024))))
grid on
%End building of FM sweep
trainlen = tmax;
%training signal
r_t = 1*rand(1,tmax);
%desired signal
s_t = 0;
%signal through channel
rt_ht = filter(num,den,r_t);
%signal through channel + desired
mic_in = s_t + rt_ht;
%LMS algorithm of echo canceller
reg1=zeros(1,50);
wts = (zeros(1,50));
mu = .07;
for n = 1:trainlen
wts_sv = wts;
reg1 = [r_t(n) reg1(1:49)];
err = mic_in(n) - reg1*(wts');
y(n) = err;
wts = wts +
mu*(reg1*(err'));
end
%plots
figure
subplot(211)
plot(1:length(y), (y))
hold on
plot(1:10000, zeros(1,10000), 'color', 'r',
'linewidth', 2, 'MarkerSize', 2)
hold off
axis([ -.5 10000 -1 1.1])
grid on
title('Steady State (time response) Desired Signal = 0, trained with white
noise')
subplot(212)
plot(1:length(y), 20*log10(abs(y)))
grid on
title('Log Magnitude Training Curve, trained with white noise')
[Hf,Wf] = freqz(wts_sv);
figure
subplot(211)
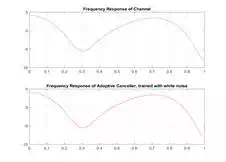
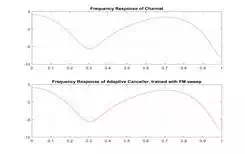
plot(Wc/pi, 20*log10(abs(Hc)))
grid on
title('Frequency Response of Channel')
subplot(212)
plot(Wf/pi, 20*log10(abs(Hf)),'color','r')
title('Frequency Response of Adaptive Canceller, trained with white noise')
grid on
In
the code, we first add the acoustic channel response into the Hc and Wc variables.
Then we build an FM sweep training signal for use in the second part of
training the echo canceller. We then define the signals r_t, s_t, Ort_ht, and mic_in to
reflect Figure 1. Now comes the bulk of the adaptive canceller: we train it
with a simple iterative least mean squares approach.
First, we
define a register of depth 50. This is analogous to an array in C or C++
(embedded application). We then define an empty array of weights--wts--and set the
μμ
, which is an important
stepping factor in the least mean squares algorithm which takes tiny steps each
iteration to find the optimal set of weights which describe the acoustic
channel and give the smallest error for each input. The LMS algorithm is simple--
we first add a sample of white noise to the register, then calculate the error:
err=mic_in(n)−reg1∗wts′err=mic_in(n)−reg1∗wts′
and then update the weights
wts=wts+μ∗(reg1∗err′)wts=wts+μ∗(reg1∗err′)
The
derivation of the weight update is a long-winded explanation which I will not
get into in this article, but will post a separate explanation of soon.
However, the update reduces to the current weights plus
μμ
times the contents of
the register times the transpose of the error. Letting this run until
convergence, we see that our algorithm finds the ultimate set of weights when
trained on white noise to reach the desired signal of 0.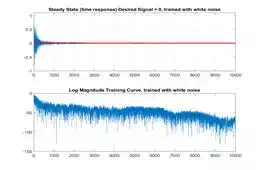
And we
can see the echo canceller response converges almost exactly to the acoustic
channels frequency response.
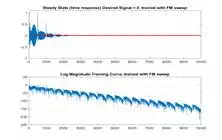
Now if we
train it without the FM signal, we see it converges a little slower, but the
error is magnitudes smaller!
And that's it--a pretty decent echo canceller in a couple
lines of code. Look out for the Least Mean Squares article for a more thorough
investigation into how the algorithm works!