Network Topology
Introduction
Topology refers to the way in which the network of computers is connected. Each topology is suited to specific tasks and has its own advantages and disadvantages. The choice of topology is dependent upon type and number of equipment being used, planned applications and rate of data transfer required, response time, and cost. Topology can also be defined as the geometrically interconnection pattern by which the stations (nodes/computers) are connected using suitable transmission media (which can be point- to-point and broadcast). Various commonly used topologies are discussed in the following sections.
Mesh Topology
In this topology each node or station is connected to every other station as shown in Fig. The key characteristics of this topology are as follows:
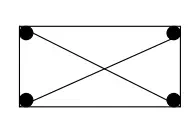
Mesh Topology
Key Characteristics:
· Fully connected
· Robust – Highly reliable
· Not flexible
· Poor expandability
Two nodes are connected by dedicated point-point links between them. So the total number of links to connect n nodes = n(n-1)/2; which is proportional to n2 . Media used for the connection (links) can be twisted pair, co-axial cable or optical fiber. With this topology there is no need to provide any additional information, that is from where the packet is coming, along with the packet because two nodes have a point-point dedicated link between them. And each node knows which link is connected to which node on the other end.
Mesh Topology is not flexible and has a poor expandability as to add a new node n links have to be laid because that new node has to be connected to each of the existing nodes via dedicated link as shown in Fig. 5.1.2. For the same reason the cost of cabling will be very high for a larger area. And due to these reasons this topology is rarely used in practice.
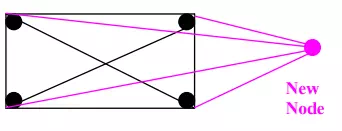
Adding a new node in Mesh Topology
Bus Topology
In Bus Topology, all stations attach through appropriate hardware interfacing known as a tap, directly to a linear transmission medium, or bus as shown in Fig. 5.1.3. Full-duplex operation between the station and the tap allows data to be transmitted onto the bus and received from the bus. A transmission from any station propagates the length of the medium in both directions and can be received by all other stations. At each end of the bus there is a terminator, which absorbs any signal, preventing reflection of signal from the endpoints. If the terminator is not present, the endpoint acts like a mirror and reflects the signal back causing interference and other problems.
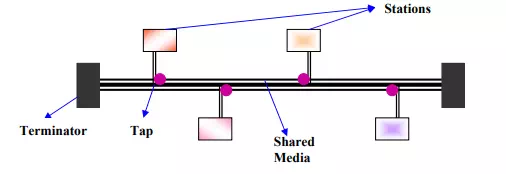
Bus Topology
Key Characteristics of this topology are:
· Flexible o Expandable
· Moderate Reliability
· Moderate performance
A shared link is used between different stations. Hence it is very cost effective. One can easily add any new node or delete any node without affecting other nodes; this makes this topology easily expandable. Because of the shared medium, it is necessary to provide some extra information about the desired destination, i.e. to explicitly specify the destination in the packet, as compared to mesh topology. This is because the same medium is shared among many nodes. As each station has a unique address in the network, a station copies a packet only when the destination address of the packet matches with the self-address. This is how data communications take place among the stations on the bus.
As there are dedicated links in the mess topology, there is a possibility of transferring data in parallel. But in bus topology, only one station is allowed to send data at a time and all other stations listen to it, as it works in a broadcast mode. Hence, only one station can transfer the data at any given time. Suitable medium access control technique should be used so as to provide some way to decide “who” will go next to send data? Usually a distributed medium access control technique, as discussed in the next lesson, is used for this purpose.
As the distance through which signal traverses increases, the attenuation increases. If the sender sends data (signal) with a small strength signal, the farthest station will not be able to receive the signal properly. While on the other hand if the transmitter sends the signal with a larger strength (more power) then the farthest station will get the signal properly but the station near to it may face over-drive. Hence, delay and signal unbalancing will force a maximum length of shared medium, which can be used in bus topology.
STAR Topology
In the star topology, each station is directly connected to a common central node as shown in Fig. Typically, each station attaches to a central node, referred to as the star coupler, via two point-to-point links, one for transmission and one for reception.
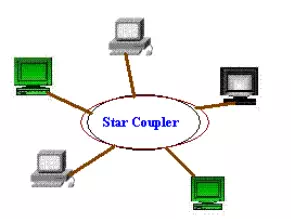
Star Topology
Key features:
· High Speed
· Very Flexible
· High Reliability
· High Maintainability
In general, there are two alternatives for the operation of the central node.
· One approach is for the central node to operate in a broadcast fashion. A transmission of a frame from one station to the node is retransmitted on all of the outgoing links. In this case, although the arrangement is physically a star, it is logically a bus; a transmission from any station is received by all other stations, and only one station at a time may successfully transmit. In this case the central node acts as a repeater.
· Another approach is for the central node to act as a frame-switching device. An incoming frame is buffered in the node and then retransmitted on an outgoing link to the destination station. In this approach, the central node acts as a switch and performs the switching or routing function. This mode of operation can be compared with the working of a telephone exchange, where the caller party is connected to a single called party and each pair of subscriber who needs to talk have a different connection.
Very High speeds of data transfer can be achieved by using star topology, particularly when the star coupler is used in the switch mode. This topology is the easiest to maintain, among the other topologies. As the number of links is proportional to n, this topology is very flexible and is the most preferred topology.
Ring topology
In the ring topology, the network consists of a set of repeaters joined by point-to-point links in a closed loop as shown in Fig. 5.1.5. The repeater is a comparatively simple device, capable of receiving data on one link and transmitting them, bit by bit, on the other link as fast as they are received, with no buffering at the repeater. The links are unidirectional; that is data are transmitted in one direction only and all are oriented in the same way. Thus, data circulate around the ring in one direction (clockwise or counter clockwise).
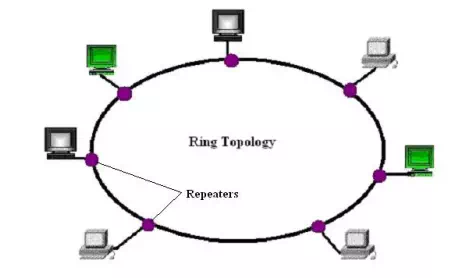
Ring Topology
Each station attaches to the network at a repeater and can transmit data onto the network through that repeater. As with the bus and tree, data are transmitted in frames.
As a frame circulates past all the other stations, the destination station recognizes its address and copies the frame into a local buffer as it goes by. The frame continues to circulate until it returns to the source station, where it is removed. Because multiple stations share the ring, medium access control is needed to determine at what time each station may insert frames.
How the source knows whether it has to transmit a new packet and whether the previous packet has been received properly by the destination or not. For this, the destination change a particular bit (bits) in the packet and when the receiver sees that packet with the changed bit, it comes to know that the receiver has received the packet.
This topology is not very reliable, because when a link fails the entire ring connection is broken. But reliability can be improved by using wiring concentrator, which helps in bypassing a faulty node and somewhat is similar to star topology.
Repeater works in the following three modes:
Listen mode: In this mode, the station listens to the communication going over the shared medium as shown in Fig.
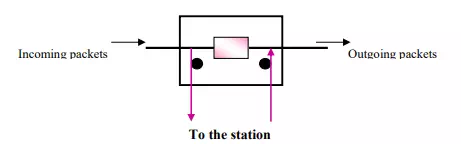
Repeater in Listen Mode
Transmit mode: In this mode the station transmit the data over the network as shown in Fig.
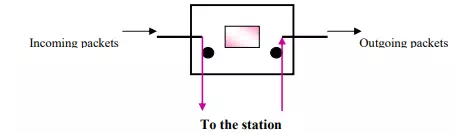
Repeater in Transmit Mode
By-Pass mode: When the node is faulty then it can be bypassed using the repeater in bypass mode, i.e. the station doesn’t care about what data is transmitted through the network, as shown in Fig. 5.1.8. In this mode there is no delay introduced because of this repeater.
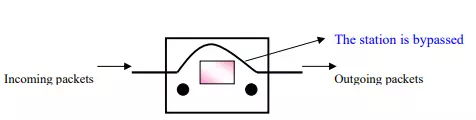
Repeater in Bypass Mode
Tree Topology
This topology can be considered as an extension to bus topology. It is commonly used in cascading equipment’s. For example, you have a repeater box with 8-port, as far as you have eight stations, this can be used in a normal fashion. But if you need to add more stations then you can connect two or more repeaters in a hierarchical format (tree format) and can add more stations. In the Fig, R1 refers to repeater one and so on and each repeater is considered to have 8-ports.
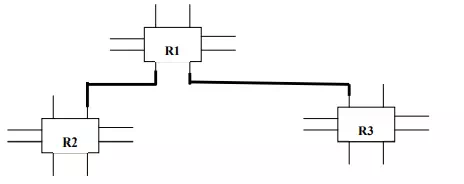
Tree Topology
This tree topology is very good in an organization as incremental expansion can be done in this way. Main features of this topology are scalability and flexibility. This is because, when the need arises for more stations that can be accomplished easily without affecting the already established network.
Unconstrained Topology
All the topologies discussed so far are symmetric and constrained by well-defined interconnection pattern. However, sometimes no definite pattern is followed, and nodes are interconnected in an arbitrary manner using point-to-point links as shown in Fig. Unconstrained topology allows a lot of configuration flexibility but suffers from the complex routing problem. Complex routing involves unwanted overhead and delay.
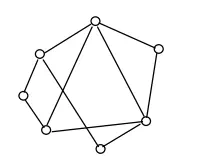
Unconstrained Topology