Introduction to Hybrid Energy Storage System for a Coaxial Power-Split Hybrid Powertrain
Energy conservation and emission reduction are two important tasks for a sustainable development of our industrial society. In terms of automotive industry, applications of hybrid electric vehicle (HEV), electric vehicle (EV), and fuel cell vehicle (FCV) are effective technical approaches for energy conservation and emission reduction [1, 2]. Currently, EV and HEV cannot comprehensively fulfill the requirements of transit buses due to their poor durability and high cost. However, HEV is a feasible solution with high reliability and relatively low cost.
There are two kinds of power source for an HEV: one is internal combustion engine, and the other is electric energy storage system (ESS). An ESS can discharge electric power to propel the vehicle or absorb electric power during the regenerative braking process. Generally, the architecture of an HEV powertrain can be classified as series hybrid, parallel hybrid, and power-split hybrid [3]. Taking into account the heavy-duty hybrid powertrain for transit buses, series hybrid and parallel hybrid are widely adopted presently. For instance, Orion VII and Man Lion use series hybrid powertrain for their transit buses. Volvo and Eaton designed two types of parallel hybrid powertrain for heavy-duty applications.
With the progress of technology, the battery used for the ESS of an HEV has been gradually shifted from lead-acid, NiCad, and Ni-MH to lithium-ion battery. Lithium-ion batteries will be used widely as the ESS for various vehicles because of their high-energy density, good safety, and long durability [4]. Currently, the materials of lithium-ion batteries are mainly lithium iron phosphate and nickel-cobalt-manganese ternary composite [5]. An HEV transit bus undergoes frequent acceleration and deceleration during its working time and requires large working currents of the ESS for these processes. Because the discharge and charge rates of lithium-ion battery are limited, if the ESS consists of only lithium-ion batteries, a large capacity of lithium-ion batteries is required, which will increase the cost and weight of an HEV greatly. To overcome this problem, hybrid energy storage system (HESS) composed of lithium-ion batteries and supercapacitors is employed. In contrast to a lithium-ion battery, a supercapacitor can charge or discharge with very large instantaneous currents. This characteristic can provide sufficient electric power during the acceleration process and store electric energy during the regenerative braking process. Because supercapacitors use a porous carbon-based electrode material, a very high effective surface area can be obtained by this porous structure compared to a conventional plate structure. Supercapacitors also have a minimal distance between the electrodes, which result in a very high capacitance compared to a conventional electrolytic capacitor [6, 7]. Apart from the fast charge/discharge rates and the high-power density, supercapacitors have much longer lifetimes (>100,000 cycles) compared to lithium-ion batteries [8–10]. However, supercapacitors normally have a much smaller energy capacity compared with lithium-ion batteries. Therefore, using an HESS can fully utilize the advantages of these two kinds of energy storage devices and avoid their disadvantages.
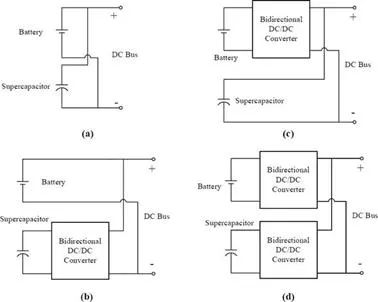
Figure 1 shows four primary topologies of an HESS, which encompass passive hybrid topology, supercapacitor semi-active hybrid topology, battery semi-active hybrid topology, and parallel active hybrid topology [11, 12]. The passive hybrid topology is the simplest to combine battery and supercapacitor together. The advantage of this topology is that no power electronic converters are needed. Because the voltage of the DC bus is stabilized by the battery, the stored energy of the supercapacitor cannot be utilized sufficiently. In the supercapacitor semi-active topology, the battery is connected to the DC bus directly, while the supercapacitor uses a bidirectional DC/DC converter to interface the DC bus. As a result, the voltage of the DC bus equals the output voltage of the battery so that it cannot be varied too much. But the voltage of the supercapacitor can be changed in a wide range. The disadvantage of this topology is that a large size of DC/DC converter is required. In the battery semi-active topology, the supercapacitor is connected to the DC bus directly, while the battery uses a bidirectional DC/DC converter to interface the DC bus. The advantage is the battery current can be maintained at a near constant value, thus the lifetime and energy efficiency of the battery can be improved significantly. The main shortcoming of this topology is that the voltage of the DC bus will vary during the charging/discharging process of the supercapacitor. The parallel hybrid topology is an optimal choice that can solve all the problems of the above topologies. The disadvantage is that two DC/DC converters are needed which will increase complexity, cost, and additional losses of the system. Three different topologies of HESS using supercapacitors as the main energy storage device for EV application were analyzed by Song et al. [13]. Rothgang et al. studied the performance of an active hybrid topology [14]. Among these various architectures, the supercapacitor semi-active hybrid topology using lithium-ion batteries as the main storage device is considered as a good solution for HEV application due to its high-power density and low cost.
Most of investigations about HESS focus on EV applications. Hung and Wu designed a rule-based control strategy for the HESS of an EV and estimated the system performance [15]. Vulturescu et al. tested the performance of an HESS consisting of NiCad batteries and supercapacitors [16]. Song et al. compared three different control strategies for an HESS, which included a rule-based control, a model predictive control, and a fuzzy logic control [17]. An HESS can also be used with a fuel cell and successfully satisfy the requirements of an FCV [18–20]. However, few investigations are concentrated on the application of an HESS for an HEV at present because they are more complicated than those for an EV. Masih-Tehrani et al. studied the energy management strategy of an HESS for a series hybrid powertrain [21] and Nguyen et al. investigated the performance of a belt-driven starter generator (BSG)-type parallel hybrid system with an HESS [22]. All these studies give the HESS an advantage over the ESS with only batteries.
The control strategy of an HESS for an EV is easier than that for an HEV or an FCV because it only needs to consider the power distribution between the batteries and supercapacitors. By contrast, the control strategy of an HEV with an HESS must assign the power demand of vehicle among the ICE, the batteries, and the supercapacitors, thus it is more complicated. Currently, few researches about the HESS for a power-split HEV are reported. In this study, a coaxial power-split HEV with an HESS for heavy-duty transit bus application is evaluated. The HESS uses lithium-ion batteries as the main energy storage device. The performance of the hybrid transit bus is analyzed using the Chinese Transit Bus City Driving Cycle (CTBCDC).
System description
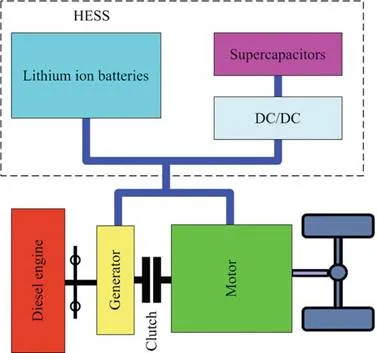
Figure 2 shows the architecture of the designed coaxial power-split hybrid powertrain for a transit bus with a supercapacitor semi-active hybrid energy storage system. The auxiliary power unit (APU) consists of a diesel engine and a permanent magnetic synchronous generator (PMSG) whose shafts are connected directly. This shaft is also associated with the input axle of the clutch. The output axle of the clutch is linked to a permanent magnetic synchronous motor (PMSM) whose shaft is also connected to the final drive. Besides the diesel engine, an HESS composed of lithium-ion batteries and supercapacitors as well as a bidirectional DC/DC converter is used to provide electric power to the PMSM. A high-voltage power line is connected to the PMSG, the PMSM, the battery pack, and the DC/DC converter. The supercapacitor pack exchanges electric power with the high-voltage power line via the controllable bidirectional DC/DC converter.
Mathematical model
A mathematical model of the coaxial power-split hybrid powertrain with an HESS is established to analyze the system performance. According to the working principle of the entire system, a lumped-parameter model is used.
VEHICLE DYNAMICS
Since the rear axle is used to drive the hybrid transit bus, the tractive force of the rear axle is determined according to the longitudinal vehicle dynamics [23].
The PMSM model accounts for the requested torque Tmr and the input power Pm calculated by a two-dimensional (2D) lookup table measured from a motor test bench [24].
In the coaxial power-split hybrid powertrain, a clutch is used to control the operation mode that is either the series or the parallel mode. The mathematical model of the clutch is a simple friction model [25], which is used to determine the clutch state among the engaged, the slipping, and the disengaged states. The torque and speed transmitted through the clutch are also determined.
AUXILIARY POWER UNIT
Normally, an auxiliary power unit is a combination of the engine and the generator. The diesel engine model accounts for the requested torque Ter according to the engine output torque Te and the engine speed ωe.

Energy management strategy design
The control strategy of a coaxial power-split hybrid powertrain only using supercapacitors as energy storage system was designed by Ouyang et al. previously, which involves series hybrid mode, parallel hybrid mode, and the mode transition logic [28]. For the coaxial power-split hybrid powertrain with an HESS, one more task must be designed—the energy management strategy of the HESS. The thermostatic control, the power follower control, and the optimal control [29] are the three main control strategies for the series hybrid mode while the parallel electric assist control, the adaptive control, and the fuzzy logic control are normally used for the parallel hybrid mode. Currently, the rule-based control, the filter control, the model predictive control, and the fuzzy logic control are the four main control strategies of an HESS to distribute the power demand between the batteries and the supercapacitors.
Investigations indicate that the performance of rule-based control strategy can approach to that of the optimal control after optimization of the parameters of the rule-based control [30]. Therefore, in this study, a rule-based control strategy for the coaxial power-split hybrid powertrain is designed and is shown in Figure 3. The entire rule-based control strategy is composed of a series mode control and a parallel mode control as well as an HESS control. The series mode control strategy uses a power follower control method shown in Figure 3. If the driving power demand of the vehicle is lower than a certain value, the system enters the series mode control. First, the required power of the motor Pd is computed according to the system mathematical model. Then, the output power of the engine is determined based on the generator efficiency map. The modified discharging/charging power is calculated according to the difference between the present SOC and the target one. Subsequently, the requested power of the diesel engine is determined according to the defined optimal operation line (OOL) of the series mode control [31]. Meanwhile, the engine on/off state is decided due to the required power Pd and the current SOC. If the engine state is on, the final required engine torque and speed are computed according to the requested power of the engine and the defined OOL.
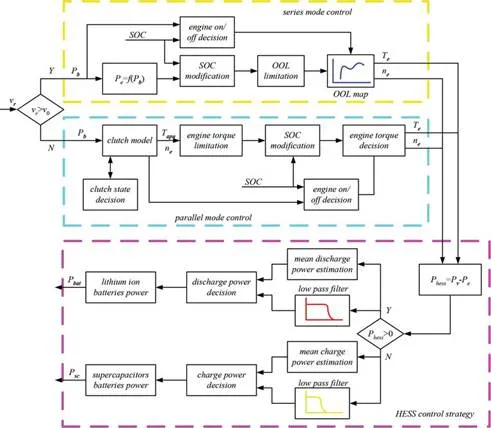
If the vehicle velocity is greater than the set value, the system changes to the parallel mode control. A parallel electric assist control strategy is used in this research and is shown in Figure 3. First, the demanded speed and torque of the auxiliary power unit are determined by the clutch model according to the power demand of the motor Pd. In the clutch model, the decision logic of the clutch state sets the working state of the clutch. When the clutch is engaged at the parallel mode control, the requested torque of the APU, which equals the output torque of the engine, is the summation of the driving torque directly transferred to the final drive and the charge torque that is transmitted to the generator. The motor provides the remaining driving torque simultaneously. Subsequently, the control parameters of the parallel mode are optimized across the overall engine’s working region. Same as the series mode control, the modified discharging/charging power is calculated. Then, engine on/off state is decided by the clutch state and the SOC as well as the requested vehicle velocity. At last, the requested torque and speed of the engine are determined based on the engine state and the power demand.
The requested power of the diesel engine is obtained by the series or parallel control strategy. Then, the power demand of the HESS Phess can be calculated as the difference between the power demand of the motor and the request power of the diesel engine. The HESS energy management strategy is in charge of the distribution of the power demand between the lithium-ion batteries and the supercapacitors. The detailed strategy shown in Figure 3 is a combination of the rule-based control and the filter control. If Phess is positive, the HESS should output electric power to the power line. First, an algorithm estimates the mean discharge power during the driving cycle and a low-pass filter outputs a filtered discharge power of the batteries. Then, the discharging power decision block calculates the output powers of the batteries and the supercapacitors based on the designed threshold values of SOC and the mean discharge power. If Phess is negative, the motor outputs electric power to charge the HESS. Thereby, the control strategy is similar with the positive situation. Meanwhile, an SOC correction algorithm of the supercapacitors is employed based on the vehicle velocity for the discharging process.
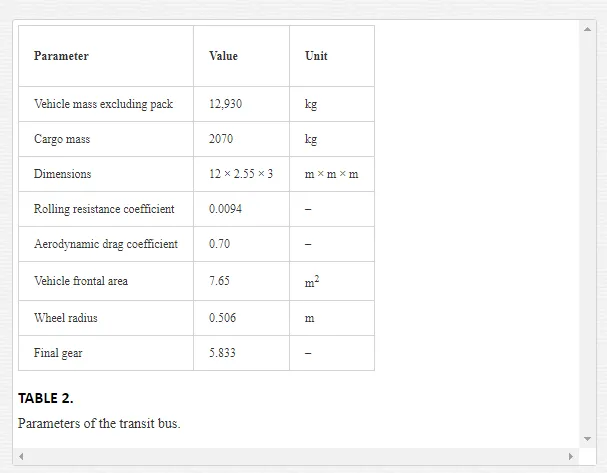
Results and discussion
A program was developed using Matlab and Advisor according to the mathematical model of the coaxial power-split hybrid powertrain with an HESS. The designed simulation model combines the backward- and forward-facing methods and can evaluate the drivability and economy of the coaxial power-split hybrid powertrain system. In this research, a hybrid transit bus with a total mass of 15 ton manufactured by Higer Bus Company Limited is applied. The detailed parameters of the hybrid transit bus are listed in Table 2.
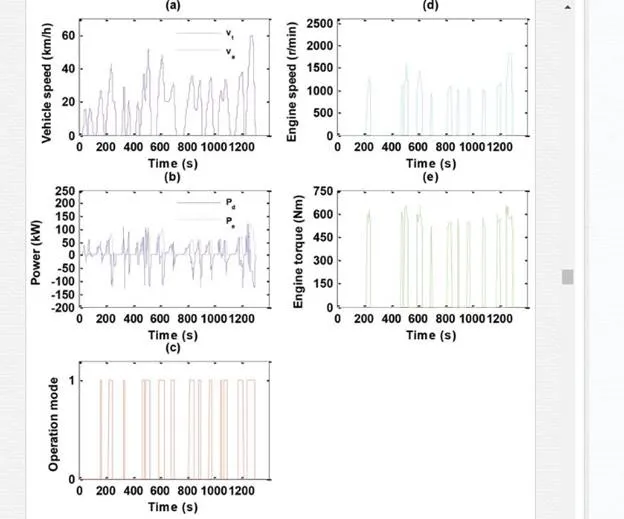
The system operation state is shown in Figure 4c, where 0 represents the EV mode, 1 means the series control mode, and 2 denotes the parallel control mode. If the vehicle driving power is greater than 110 kW, the operation mode switches from the series mode to the parallel mode. Meanwhile, the EV mode can be changed from both the series control mode and the parallel control mode. The output speed and torque of the diesel engine are shown in Figure 4d and e, respectively. Because the power follower control is used for the series control mode and the engine speed is proportional to the vehicle velocity at the parallel mode, the engine speed varied from 1494 to 1842 r/min during the working process. Furthermore, the engine output torque maintains at a high level of 550.4–761.6 Nm when the engine is running.
The performance of the HESS for the coaxial power-split hybrid powertrain is displayed in Figure 5. The output power of the HESS is given in Figure 5a. The output powers of each of the energy storage devices are given in Figure 5b, where the dashed line is used for the lithium-ion batteries, and the dash dotted line is used for the supercapacitors. In Figure 5, positive values represent discharging process and negative is used for charging. The output power of the HESS varies with the power demand of the motor. The maximum and minimum output powers achieve 104.8 and −112.9 kW, respectively. The output power of the lithium-ion batteries changes from −50 to 50 kW during the driving cycle, which means the output current of the batteries can be significantly decreased. The supercapacitors discharge or charge with large powers for the high-power working conditions to compensate the power difference between Phess and Pbat. The SOC profiles for the lithium-ion batteries and the supercapacitors are shown in Figure 6c. During the charge sustain mode, the SOC of the batteries manifests a very small variation during the cycle. As a contrast, the SOC of the supercapacitors varies within a wide range from 0.395 to 0.99. The reason is that the capacity of the lithium-ion batteries is much greater than that of the supercapacitors and the output power of the lithium-ion batteries is constrained to a small range. The output voltages of the batteries and the supercapacitors are shown in Figure 5d. The output voltage of the lithium-ion batteries, which equals the power line voltage, changes in a very small range from 559.1 to 584.9 V. The stable voltage characteristic will be beneficial for the operations of the motor and the generator. Although the output voltage of the supercapacitors varies in a large scope, it is still within the allowable voltage ratio of the DC/DC module. The currents of the batteries and the supercapacitors are displayed in Figure 5e. The current of the supercapacitors increases while the current of the batteries is much smaller and the discharging/charging rate of the batteries is less than 4C, which is very helpful for the life extension of the batteries.

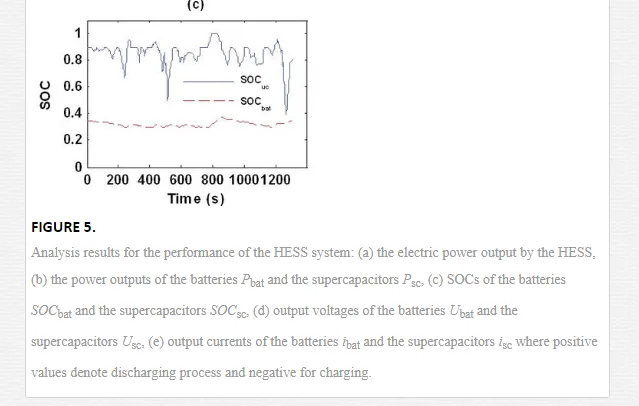

Figure 6 gives the performances of the motor and the generator of the coaxial power-split hybrid powertrain with an HESS. The input power of the motor generally follows the vehicle driving power during the cycle, which means only a small part of the mechanical power of the diesel engine is used to propel the vehicle directly. Although the current of the motor varies in a wide range from −193.6 to 215.9 A, it does not exceed the maximum operation current of the motor. The generator operates only a small part of the time and its output power changes mainly from 24.38 to 104.8 kW. The current of the generator varies with the output power because the power line voltage is stable.
To evaluate the potential of fuel saving for the coaxial power-split hybrid powertrain with an HESS, 12 prototypes of hybrid transit bus were built and applied to a practical city routes in Ningbo, Zhejiang Province. A total mileage of over 40,000 km for each hybrid transit bus was achieved, and the average fuel consumption is approximately 24.53 L/100 km, which is listed in Table 3. Using the established mathematical model and the analysis program, the estimated fuel consumption of the coaxial power-split hybrid powertrain with an HESS is 24.43 L/100 km, which is also listed in Table 3. The SOC difference of the lithium-ion batteries between the start and end points is 0.0034. The practical driving routes in Ningbo are different with the CTBCDC driving cycle. The start/stop frequency is decreased compared with the CTBCDC driving cycle. Therefore, the improvement of fuel efficiency is a bit lower. On the other hand, the ambient temperature and the total vehicle weight varying during the practical driving conditions also have a great influence on the fuel consumption. Herein, the experimental result only gives a very coarse and average evaluation of the fuel efficiency. Moreover, the fuel consumption of a conventional powertrain using a YC6G270 diesel engine and a five-gear manual transmission is computed based on the same vehicle parameters as the hybrid transit bus. The total mass of the bus with the conventional powertrain is 15,000 kg, which is the same as that of the coaxial power-split hybrid powertrain with an HESS. The result is 36.33 L/100 km. Compared with the results of the conventional powertrain, the fuel consumption of the coaxial power-split hybrid powertrain with an HESS can be decreased significantly by about 32.5%.

From the viewpoint of energy efficiency, the reason for such a great fuel reduction can be explained. Figure 7 shows the effective thermal efficiency map of the YC6J220 diesel engine obtained on an engine test bench. The engine’s working points estimated by the analysis program are also displayed. The OOL line of the series control mode is represented by the thick solid line in Figure 7. As a contrast, the effective thermal efficiency map of the YC6G270 diesel engine for the conventional powertrain and the corresponding working points are given in Figure 8. It can be seen that the engine working points of the coaxial power-split hybrid powertrain with an HESS are very close to the region having the peak efficiency and their thermal efficiencies are greater than 40%. However, the working points of the conventional powertrain shown in Figure 8 will change with the vehicle velocity, resulting in a very wide distribution from the idle speed to the full load. Therefore, many working points of the conventional powertrain locate in the low-efficiency regions, leading to a low efficiency of the entire powertrain system.


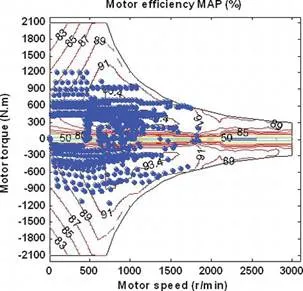
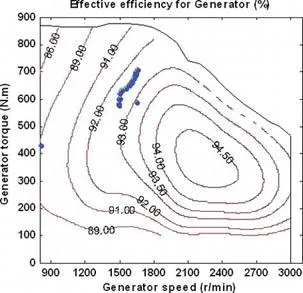
The energy efficiency map of the PMSM obtained on a motor test bench and the relative working points for the CTBCDC driving cycle are given in Figure 9. A large part of the working points situates close to the peak-efficiency region. The efficiencies of most of the working points are higher than 93.4% except for the low-speed and small-load regions. The energy-weighted average efficiency of the motor during the CTBCDC driving cycle is 91.92%. Because the motor is connected to the final drive without a transmission, a particular design of the PMSM can ensure that the motor efficiency is high enough for low-speed working conditions. The energy efficiency map of the PMSG measured on a motor test bench and the corresponding working points for the CTBCDC driving cycle are displayed in Figure 10. The efficiencies of the PMSG are found to be between 92 and 93% during the CTBCDC driving cycle, and the energy-weighted average efficiency is 92.55%, which approaches the peak efficiency of the PMSG
Conclusions
In this study, the system performance of a coaxial power-split hybrid powertrain with an HESS for transit bus application was investigated. First, a system topology was designed. Then, a mathematical model was established and an energy management strategy was developed. Finally, the energy efficiency of the hybrid powertrain system was evaluated by Matlab and Advisor. The main conclusions are summarized as follows:
1. Compared with the results of a coaxial power-split hybrid powertrain with supercapacitors as energy storage device, the equivalent fuel consumption of the designed coaxial power-split hybrid powertrain with an HESS is a bit higher (24.43 vs. 20.46 L/100 km). The reason is that the energy capacity of the supercapacitors in this study is much smaller than that of the hybrid powertrain with only supercapacitors. Thus, the amount of the recovered regenerative energy is smaller than that of the hybrid powertrain with only supercapacitors. On the other hand, the DC/DC converter and the battery pack also have some losses during the working processes. As a result, the energy efficiency of the coaxial power-split hybrid powertrain with an HESS is lower than that of the hybrid powertrain with supercapacitors. Because we have no data about the coaxial power-split hybrid powertrain with only batteries, a quantitative comparison cannot be given here. Generally, if only batteries are used for the energy storage system, a large size will be used and the cost will increase a lot. The energy efficiency of such a system will be a trade-off between cost and lifetime of the batteries. Nevertheless, the results of this study show that the coaxial power-split hybrid powertrain with an HESS has a very good energy efficiency compared with a conventional powertrain of the same level.
2. Because the designed HESS has a smaller size and weight and lower price than that with only supercapacitors, and the lithium-ion batteries of the HESS can operate at an averaged current and thus have a longer life cycle, the HESS is more suitable for hybrid transit bus application.
3. The power line voltage of the HESS is more stable than that with only supercapacitors. This will be beneficial for the operation of the accessories such as the air conditioner or the in-vehicle infotainment system during the driving process.