Dual Hybrid Systems
If the parallel system is modified by the addition of a second electrical machine (which is equivalent to adding a mechanical power transmission route to the series system), the result is a system that allows transmission of the prime mover power through two parallel routes: (1) electrically, and (2) mechanically. This is equivalent to the use of a mechanical shunt transmission with a continuously variable transmission (CVT) to give an infinitely variable transmission (IVT) (Ironside and Stubbs, 198 1). The result is a transmission that enables the engine to operate at a high efficiency for a wider range of vehicle operating points. A well-documented example of this configuration is the "dual" hybrid system developed by Equos Research (Yamaguchi et al., 1996) and used in the Toyota Prius. Figure below shows this system.

The planetary gears act as a "torque divider," sending a proportion of the engine power mechanically to the wheels and driving an electric machine (M 1) with the remainder. Consequently, the configuration acts simultaneously as a parallel and a series hybrid. Engine speed is controlled using Machine 1, removing the need for a transmission, a clutch, or a starter motor. Machine 2 acts in the same way as the motor in a parallel system, supplementing or absorbing torque as required. The diagrams below show the possible modes of operation, and each mode is explained next.
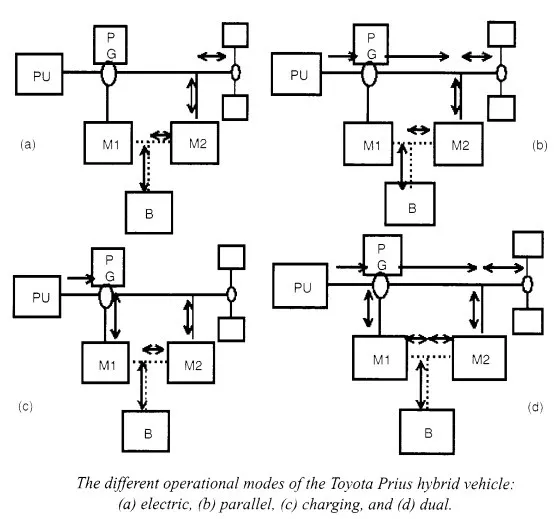
Electric Mode. (a) The engine is switched off, and Machine 1 acts as a "virtual clutch," keeping the engine speed at zero. Torque and regenerative braking are provided by Machine 2.
Parallel Mode. (b) Machine 1 is stationary (perhaps with a brake applied), and the configuration is a simple parallel one, with a fixed engine-to-road gear ratio.
Charging Mode. (c) The vehicle is stationary, and all of the engine power is used to drive Machine 1 and charge the batteries. Torque is still transferred to the wheels, allowing the car to "creep."
Dual Mode. (d) Some power is used to drive the wheels directly, while the remainder powers Machine 1. The speed of Machine 1 determines the engine operating speed.
The charging and parallel modes are effectively subsets of the dual mode, and this continuity in control is the real strength of the configuration. The dual hybrid configuration combines the advantages of both series and parallel, as follows:
Optimal engine operating point at all times.
Much of the power (especially at cruising speeds) is delivered mechanically to the wheels, thereby increasing efficiency.
Charging is possible, even when the vehicle is stationary.
The combined torque of the engine and Machine 2 is available, improving performance.
Compared to a series hybrid (where the electrical machines must be rated for the prime mover and the vehicle power requirement), only a fraction of the prime mover power is transmitted electrically in the dual hybrid system. The main difficulty with the dual hybrid is in the design of a control system, which must resolve the two degrees of freedom (engine speed and engine torque) and the associated transients into an optimal and robust control strategy. System modeling is essential for optimizing this.