Vehicle acceleration and maximum speed modeling and simulation
In engineering, simulations play a critical part in the design phase of any system. Through simulation we can understand how a system works, how it behaves under predefined conditions and how the performance is affected by different parameters.
In this article we are going to use a simplified mathematical model of the longitudinal dynamics of a vehicle, in order to evaluate the acceleration performance of the vehicle (0-100 kph time) and determine the maximum speed.
To validate the accuracy of our mathematical model, we are going to compare the simulation result with the advertised parameters of the vehicle.
Input data
The vehicle parameters are taken from a rear-wheel drive (RWD) 16MY Jaguar F-Type:
Engine | 3-litre V6 DOHC V6, aluminium-alloy | |
Maximum torque [Nm] | 450 | |
Engine speed @ maximum torque [rpm] | 3500 | |
Maximum power [HP] | 340 | |
Engine speed @ maximum power [rpm] | 6500 | |
Transmission type | automatic, ZF8HP, RWD | |
Gear ratio | 1st | 4.71 |
2nd | 3.14 | |
3rd | 2.11 | |
4th | 1.67 | |
5th | 1.29 | |
6th | 1.00 | |
7th | 0.84 | |
8th | 0.67 | |
Final drive (i0) | 3.31 | |
Tire symbol | 295/30ZR-20 | |
Vehicle mass (curb) [kg] | 1741 | |
Aerodynamic drag, Cd [-] | 0.36 | |
Frontal area, A [m2] | 2.42 | |
Maximum speed [kph] | 260 | |
Acceleration time 0-100 kph [s] | 5.3 | |
From data available on the internet, we can also extract the static engine torque values at full load, function of engine speed:
Engine speed points (full load) [rpm] | 1000 | 2020 | 2990 | 3500 | 5000 | 6500 |
Engine static torque points (full load) [Nm] | 306 | 385 | 439 | 450 | 450 | 367 |
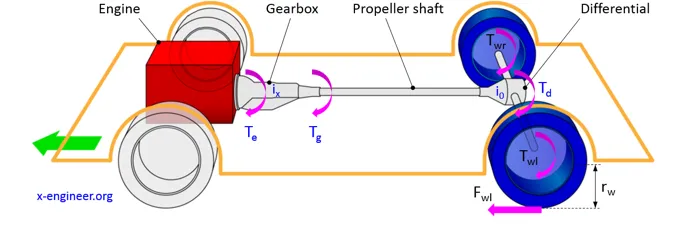
Vehicle layout
The powertrain and drivetrain of a RWD vehicle consists of:
§ engine
§ torque converter (clutch)
§ automatic (manual) transmission
§ propeller shaft
§ differential
§ drive shafts
§ wheels
Image: Vehicle rear-wheel drive (RWD) powertrain diagram
For simplicity, for our simulation example we are going to make the following assumptions:
§ the engine is only a source of torque, without any thermodynamics or inertia modeling
§ the engine is running at full load all the time
§ the effect of the torque converter is not considered
§ the gear shifting is performed instantaneous disregarding any related slip or dynamics
§ the effects of the propeller shaft and drive shafts are not considered
§ the tires have constant radius and the effect of slip is not considered
The mathematical model is going to be implemented as a block diagram in Xcos (Scilab), based on the following equations.
Mathematical equations
The vehicle movement is described by the longitudinal forces equation:

where:
Ft [N] – traction force
Fi [N] – inertial force
Fs [N] – road slope force
Fr [N] – road load force
Fa [N] – aerodynamic drag force
The traction force can be regarded a a “positive” force, trying to move the vehicle forward. All the other forces, are resistant, “negative” forces which are opposing motion, trying to slow down the vehicle.
As long as the traction force will be higher than the resistances, the vehicle will accelerate. When the traction force is smaller compared with the sum of resistant forces, the vehicle will decelerate (slow down). When the traction force is equal with the sum of resistant forces, the vehicle will maintain a constant speed.
The traction force [N] depends on the engine torque, engaged transmission gear ratio, final drive ratio (differential) and wheel radius:

where:
Te [Nm] – engine torque
ix [-] – transmission gear ratio
i0 [-] – final drive ratio
ηd [-] – driveline efficiency
rwd [m] – dynamic wheel radius
The dynamic wheel radius [m] is the radius of the wheel when the vehicle is in motion. It is smaller than the static wheel radius rws because the tire is slightly compressed during vehicle motion.

The static wheel radius [m] is calculated based on the tire symbol (295/30ZR-20). For a better understanding of the calculation method read the article How to calculate the wheel radius.
The inertial (resistant) force [N] is given by the equation:

where:
mv [kg] – total vehicle mass
av [m/s2] – vehicle acceleration
The total vehicle mass [kg] consists of the curb vehicle mass, the driver’s mass and an additional mass factor. The mass factor takes into account the effect of the rotating components (crankshaft, gearbox shafts, propeller shaft, drive shafts, etc.) on the overall vehicle inertia.

where:
fm [-] – mass factor
mcv [kg] – curb vehicle mass
md [m] – driver mass
The road slope (resistant) force [N] is given by the equation:

where:
g [m/s2] – gravitational acceleration
αs [rad] – road slope angle
The road load (resistant) force [N] is given by the equation:

where:
cr [-] – road load coefficient
The aerodynamic drag (resistant) force [N] is given by the equation:

where:
ρ [kg/m3] – air density at 20 °C
cd [-] – air drag coefficient
A [m2] – vehicle frontal area
v [m/s] – vehicle speed
The traction force is limited by the wheel friction coefficient in the contact patch. The maximum friction force [N] that allows traction is: