Advances in the technology and medical sector are heavily depending on faster, smaller and smarter precision motion control and positioning equipment. Design engineers now have access to a growing spectrum of options to improve production processes with new types of nano-precision mechanisms, and novel position sensing and force feedback technologies. Applications include mission-critical deployments in laser micro-machining, micro-assembly automation, optical inspection, semiconductor metrology, photonics components test & alignment applications to name a few.
Silicon Photonics (SiP), the convergence of photonics and semiconductors promises a leap in data throughput, parallelism and energy efficiency. Wafer level testing and packaging economics both demand extraordinary speed and parallelism. This is achieved by a combination of motorized and piezoelectric drive technologies along with high-speed, firmware-based search and align algorithms. (Image PI)
A similar feedback loop of application-demand-and-industry-response animates the laboratory research market, where rapidly advancing scientific endeavors demand ever finer and faster control of motion. Here, we see advanced motion technologies at the foundation of current Nobel-winning super-resolution microscopies, single-molecule biophysics investigations, and the latest photonics and materials developments.
Digital light sheet microscopy can provide time resolved 3D images of biological processes, critical for progress in neuroscience research. In addition to lasers and optics, it relies on several advanced precision positioning technologies.
Today’s broadening spectrum of research and industrial applications has yielded a similarly wide range of motion technologies — more than a single article can review comprehensively. But it means that Motion Control Engineers and Designers in scores of industries have access to precision motorized positioning systems that fit or even enable their applications. These systems provide extremely few limitations on travel, repeatability, precision and speed. Following is an overview of the more well-known types of motorized precision-positioning systems and some of their news.
A precision linear actuator is defined as a positioning device that produces motion in one degree of freedom, and usually does not include a guiding system for the payload. This discussion focuses on electrically-driven units, though, of course, manual micrometer-driven are common, along with screw-driven, hydraulic and pneumatic variants for lower-precision applications. A number of drive technologies are capable of producing linear motion:
These are normally based on linear shafts driven by rotational electromagnetic motors via ballscrews or lead screws. Rotary motion of the motor is transformed to linear displacement. The actuators have a generally cylindrical format. Small versions are used to replace precision screws or micrometers, conferring automated actuation.

(left) Basic design of a recirculating ballscrew. (Image: THK)
(right) A stepper motor driven ballscrew precision actuator, capable of sub-micrometer precise motion and high push/pull forces.
The motors used in these actuators are typically either DC servomotors or stepper motors. Stepper motors actuate a toothed rotor within a toothed, surrounding stator. The permanent magnet stepper motor, which is the most common type, employs a rotor made up of a magnetized material. By configuring the magnetic windings of the stator so that groups of its teeth can be specifically magnetized, the rotor is caused to rotate in steps. It will hold position at these full step positions without power. Partial steps can be attained by partly energizing the windings. As a result, a driving mode that produces “micro” or “mini” steps can be implemented, multiplying the stepping resolution of the motor.
Basic operating principle of a stepper motor.
DC servo motors are considered to be conceptually simple: a magnetized rotor within a magnetized stator, both of which have a South and a North pole. The poles of each are repelled by or attracted to each other, causing rotation to an equilibrium orientation, just as a compass is caused to orient itself with the Earth’s magnetic poles. By varying the magnetization of the stator or rotor or both electromagnetically, such as switching their polarities by using a brushed or electronic commutation approach, it is possible to make the motor spin freely and, with the addition of a position feedback encoder, provide precise positioning with excellent responsiveness. Brushless DC motors, with electronic commutation instead of commutation via carbon brushes, provide improved lifetime, especially in high-dynamic applications and can be used to offer a high static torque without problems.
A simple brushed DC servo motor.
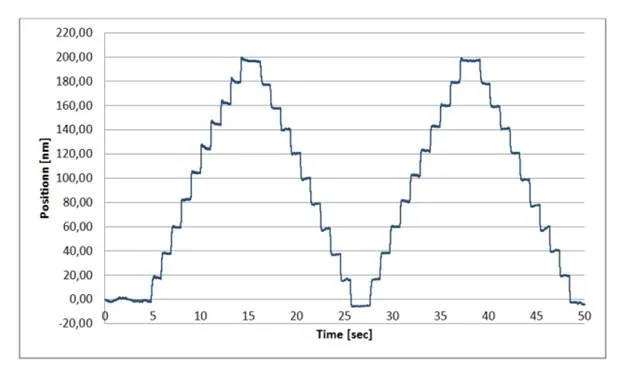
20 nm steps of an L-511 linear translation stage with stepper motor / ballscrew drive measured on an interferometer. The 200 full-step motor was controlled by a SMC Hydra controller running in microstep mode (3000 microsteps/fullstep). (Image: PI)
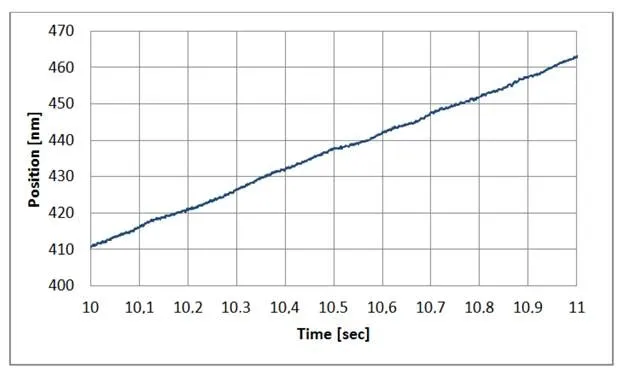
Constant velocity of an L-511 linear translation stage, commanded at 50 nm/sec, controlled by a SMC Hydra controller in 3000 microstep mode. Driven in with a good microstep controller, stepper motor stages can provide exceptionally smooth motion. (Image: PI)
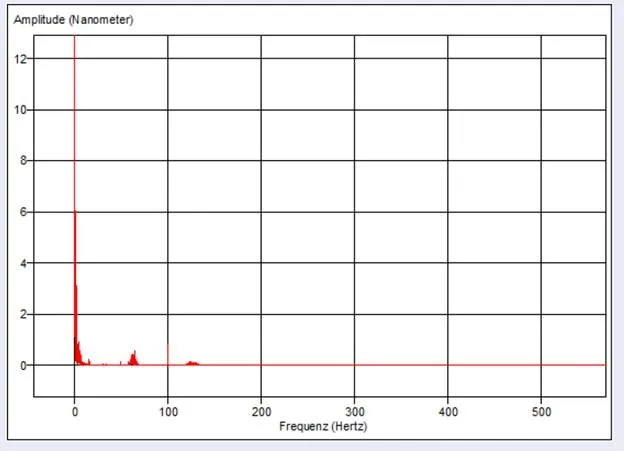
Extremely smooth motion and absence of vibration is shown in the FFT analysis of the position deviation of an L-511 stepper motor stage moving with constant velocity at 5µm/sec. (Image: PI)
Stepper motors can be operated closed or open loop, meaning with or without position feedback. It is possible to actuate a stepper motor through any specified number of steps in either direction and offers a high probability of attaining them, though certainty can only be obtained by the inclusion of a position encoder. Rotary encoders keep track of the position of the rotating motor; linear encoders encode the output position of the driven linear shaft directly, thus eliminating backlash and various other errors that could otherwise build up in the drivetrain where a rotary encoder cannot observe them. Though linear actuators with linear encoders are uncommon, they still offer unbeatable bi-directional repeatability for sensitive applications.
Extremely fine positioning resolution can be achieved by piezoelectric actuators. There are several types:
Piezo stack actuators are exquisite, layered structures of specialized ceramic interleaved with metallic electrodes. The piezo ceramic has the exceptional property of expanding in a controllable manner by applying an electrical field. These actuators provide short travel ranges (about 1% of their length), high forces, sub-nanometer precisions and sub-millisecond response. These are considered to be the mainstay of today’s enhanced nanotech applications, both in industrial applications and laboratory research, such as genomic sequencing and semiconductor manufacturing. Piezo stack actuators are inherently solid state, non-magnetic and vacuum-friendly, with no wear processes.

(left) Basic design of a piezo stack actuator: A number of thin electro-ceramic layers expand when energized. Micro-second response, high forces, and ultra-high precision are achieved. (Image: PI)
(right) P-235 high-force piezo linear actuators. These actuators can position loads of several tons with nanometer precision. (Image: PI)
Piezo stack actuators can be incorporated in flexure guiding systems with motion amplifiers in order to provide longer travel ranges and multi-axis motion if needed. Wire EDM cut flexures provide modern guiding precision together with virtually friction free motion and zero wear and maintenance. NASA achieved 100 billion cycles of motion without failures during life testing for the Mars Mission.
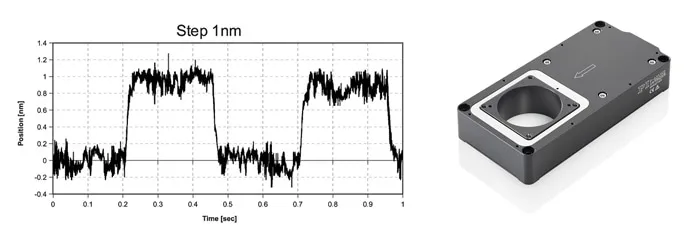
Piezo positioners can resolve motion down to 1/10 nanometer and below. The above graph shows the crisp step and settle performance of a P-630 linear stage commanded to move 1nm increments, measured with an external laser interferometer.
Ultrasonic piezomotors are monolithic piezo ceramic structures that are stimulated at their resonant frequency, normally above 100 kHz, resulting in them fluttering on a submicron scale. A friction tip developed or bonded at a resonant node conveys this fluttering oscillation to a workpiece that rides in bearings. The workpiece thus experiences a force that drives it one direction or the other. These motors are capable of attaining many millimeters of travel and extraordinary speeds in an extremely small package. For example, PI’s patented PILine® ultrasonic piezomotors can provide speeds to half a meter per second and settle/step times of a few milliseconds in some applications. Another chief attribute refers to the automatic self-locking behavior of these motors when at rest and even when unpowered. This prevents drift and dither of the driven stage. Ultrasonic piezomotors have the potential to provide an application-enabling alternative to classical motors when high speed, small dimensions and unrivaled energy efficiency are vital. Similar to piezo stack actuators, ultrasonic piezomotors are vacuum-compatible and non-magnetic.
Inertia drives, another type of piezomotor, use tiny piezo ceramic elements that are actuated in a sawtooth pattern, driving a shaft or other actuated element through a friction coupling. In fact, it is the sloped portion of the sawtooth actuation that provides the motion; the rapid retraction breaks the stiction of the coupling and the actuated element does not retract with the piezo ceramic element. Artful design can acquire silent, virtually stepless operation and long travels along with precision to the nanoscale and self-locking for high stability when stationary. Examples include PI’s U-Motion series of ultra-compact open and closed loop stages, and PIShift actuators.
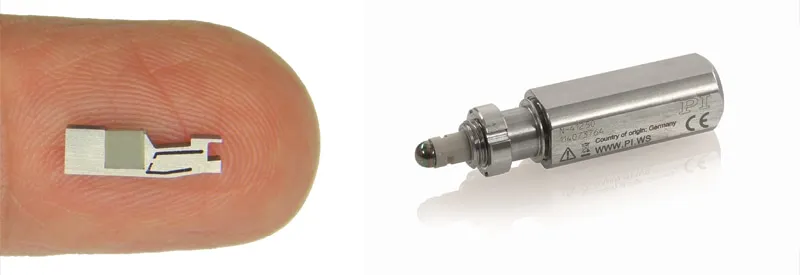
(left) Piezo inertia motors are tiny. They provide nanometer precision and are ideal for integration into miniaturized instrumentation. (Image: PI)
(right) A linear actuator based on a high-force stick-slip inertia motor. (Image: PI)
Piezo ratchet motors are considered to be a special form of inertia motors based on the stick-slip effect. A precision lead screw is driven by a small piezo ceramic actuator embedded in a spring-loaded mechanism. A slow expansion phase results in a small rotation of the screw. When the piezo element has reached, its maximum expansion, a much shorter contraction phase follows – extremely fast for the screw to follow due to its inertia.
Closed and open loop operation is possible. An optical encoder integrated into the actuator housing feeds the information back to a closed loop controller when exact position control is needed. Resolution in the nanometer rage is feasible. Advantages include the self-locking design, compact size and high holding forces (100N) compared to the size. Drawbacks refer to the slow speed – making the drive an ideal option for motion control applications in confined spaces with low dynamic requirements – such as alignment of optics, laser tuning, and opto-mechanical equipment, and a great choice for replacing mechanical micrometers.
Animation of N-472 miniature actuator.
Walking piezomotors are considered to be yet another breed. These use four or more piezoceramic fingers, which actuate in a stepping sequence in order to drive a workpiece in a desired direction. Between steps, sub-nanoscale actuation can be achieved. High power-off holding forces and essentially unlimited travel characterize these designs, exemplified by PI's NEXACT and NEXLINE technologies. The usual non-magnetic and vacuum-friendly attributes apply. These have proven to be enablers in sensitive optical positioning applications where carefully established positions must be maintained with nanometer stability without power for months or years.

A compact actuator based on the PiezoWalk principle.
Video - Multiple operating modes of a PiezoWalk linear actuator.
By attaching a linear servo motor (which can be thought of as a rotary DC motor sliced lengthwise and laid flat) to linear guidance and an output shaft, direct linear actuation of extremely high speeds can be achieved. Linear DC motors can have a multitude of North/South magnetic pairs, based on how much travel is required. These serve the role of the stator in a rotary motor. Gliding along them to produce force is a three-phase coil assembly. The phases are electronically commutated in order to produce smooth motion in the desired direction, ensuring long life.
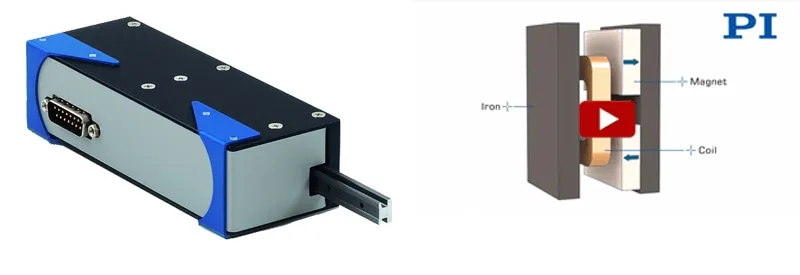
A voice-coil-driven linear actuator for closed-loop position and force control applications. Advantages are fast acceleration, high speed, and long life. (Image: PI)
Video - Physics behind a voice coil drive.
A related type of linear actuator is driven by a voice coil motor, which refers to a nested pair of cylindrical electromagnetic coils capable of attracting or repelling each other along their mutual axis. These provide travels on the order of 25 mm and provide extraordinary speeds and accelerations for small loads. Such mechanisms are extremely long lived. Voice coil actuators, like PI’s V-270 series, can offer impressive step/settle times due to their high responsiveness, and their direct actuation of the motion shaft in its low-friction bearings provides exquisite force control as well when an optional tip-force sensor is integrated. The sophisticated industrial digital controller of V-270 series actuators offers bumpless switching between a wide range of position, force, velocity and mixed servo modes, which makes them suitable for production applications including testing of touch-sensitive devices and calibrated force generation.