A linear or translation stage builds on the principles of a linear actuator, but adds a workpiece or platform for fixing an application load, or for stacking extra stages to form a multi-axis configuration. The stage’s workpiece is a precision component with a linear bearing for guidance.
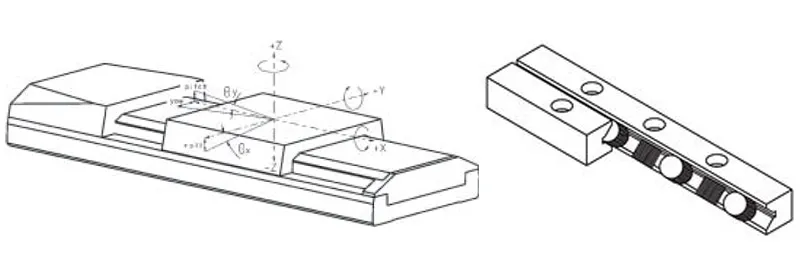
(left) Ideally, a linear translation stage should only provide motion in one degree of freedom. In reality, there is no perfect guiding system, and every linear motion will also bring about rotary / tilt errors (angular deviation) and motion components in two unwanted linear degrees of freedom (runout). (Image: PI)
(right) Crossed roller bearings provide high load capacity and better guiding precision than most ball bearings. (Image: PI)
A linear translation stage restricts teh application load to a linear single degree of freedom. An ideal linear stage completely restricts two axes of translation and three axes of rotation, thus allowing for motion on only one translational axis. In reality, there is no perfect guiding system, and every linear motion will also bring about tilt/rotary (angular deviation) and motion components in two unwanted linear degrees of freedom (runout). The capability of linear stages to provide high precision linear motion with minimized runout is critical to the success of scientific and industrial applications, such as Semiconductor Manufacturing, Research and Industrial Biotech Instrumentation, Aerospace, Materials Science, Photonics Instrumentation, and Beam Line Instrumentation.
Motorized linear stages comprise of a base and a platform, attached by some form of guide or linear bearing in such a way that the platform is restricted to linear motion with regard to the base. The position of the moving platform relative to the fixed base is normally controlled by a linear actuator of some form. The most common method is to integrate a lead screw or ball screw passing through a lead nut in the platform, as described for linear actuators.
How Piezo Walk Motors Work in Linear Stages.
However, as the drive-technology options have expanded, novel linear stages that incorporate the latest drive technologies have been introduced. These yield advantages of importance to specific applications, such as non-magnetic actuation or package-size benefits. For instance, PI’s U-751/M-686 microscopy stage provides both lower and higher speed capabilities when compared to typical stepper-motor microscopy stages, and integrates a linear encoder for 100 nm-scale bi-directional repeatabilities, all without the bulky overhanging lead screw/stepper-motor assembly that projects from the side of each axis of standard microscopy stages.
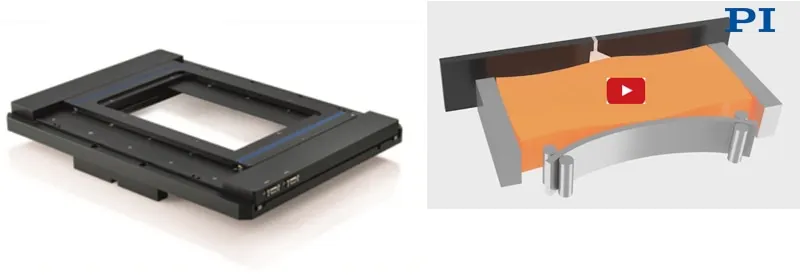
A low profile XY motor stage for microscopy applications. The ultrasonic ceramic motors are compact and self-clamping, providing extremely good long term stability without position drift. (Image: PI)
Video - Ultrasonic-motor drive principle. Ultrasonic motors provide a very large dynamic range from a few nanometers/second to 100’s o mm/second. (Image: PI)
For motion and positioning in multiple axes, individual positioning stages can be combined or parallel-kinematic hexapods with up to 6 degrees of freedom of motion can be used.
The requirements for smaller motion systems are driven by the need for miniaturization in the medical device and semiconductor industry. Smaller also means lower mass and the potential for higher acceleration and throughput, particularly when incorporated with the advanced actuation technologies that are presently available.
A new generation of piezo ceramic linear motors enables the construction of matchbox to thumbnail sized linear stages with nanometer resolution and millisecond step/settle times.
The direct drive prevents mechanical components, such as lead screws and gears, making for high-resolution and reliable drives down to a few nanometers. High forces, high velocity, and/or high resolution are achieved based on the drive principle.
Miniature linear positioning stages with linear encoder feedback and high-speed ultrasonic ceramic linear motor are shown below.

Q-motion miniaturized linear and rotary positioners based on the stick-slip effect. Nanometer precision is feasible, the drives are self-clamping when powered-off. (Image: PI)
Video - Operating principle of stick slip inertia motor. (Image: PI)
Some industrial automation processes, such as laser processing and flat panel testing, require extremely long travels past one meter with high speed and low runout errors. Air bearing stages with linear motors are now considered to be the gold standard for these applications.
Mechanical bearings are replaced with a frictionless air film by air bearing stages, which also maximize throughput while providing the ultimate level of precision, particularly for multi-axis motion. Planar designs employ one reference base plane on which magnetically or vacuum preloaded pucks are floating for both the Y and X axes. H-bridge, three-motor designs provide the highest precision, and can be further enhanced with active yaw control when provided with three linear encoders and improved motion controllers. The benefit is immensely enhanced orthogonality and straightness. Air bearing stages are generally driven by magnetic linear or torque motors that offer smooth motion without negative cogging effects.
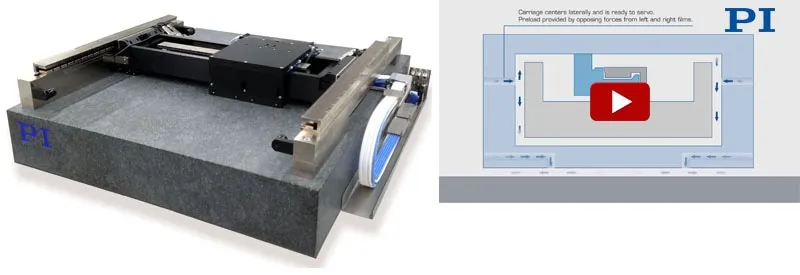
A planar air bearing XY positioning stage with active yaw control for improved straightness of motion. (Image: PI)
Video - Operating principle of an air bearing stage. (Image: PI)
It is also possible to combine linear and torque motors with mechanical bearings. This combination is frequently used in industrial applications when the smoothness and flatness/straightness of motion is not considered to be as critical as with air bearings. Linear motors offer an outstanding combination of precision, reliability and speed.
2 nanometer steps performed repeatedly by a V-551.4B stage with absolute encoder (BISS), driven by the C-891 motion controller, measured with Zygo ZMI interferometer. Steps down to 1 nanometer can be resolved with the absolute encoder. For even smaller steps, the PIOne incremental encoder is available.
The high dynamics of linear motors guarantees high throughputs of automated tasks in testing systems, for instance, in the semiconductor industry. They also increase efficiency, for example, in assembly lines/electronics production or laser processing.

V-551 translation stage with 3-phase linear motor (Image: PI)
Video - Physics behind a 3-phase motor (Image: PI)
Unlike motion systems that are operated by rotary stepper and servo motors and lower precision rotary encoders, linear motors require linear positional feedback systems. A linear encoder is a digital position transducer that directly measures linear motion where it takes place as opposed to a rotary encoder mounted at the end of a drive train. The actual position is read by the linear encoder as close to the point of interest as possible, and therefore, the resulting accuracy and repeatability of the payload is higher. Linear encoders comprise of a read head and a linear track. The linear track can range in length from a few mm to several feet. While most encoders are based on an optical grating, cost-effective magnetic encoders are still available. While resolution in the sub-nanometer range is common, accuracy is usually limited to 1 µm per 100 mm. However, this can be improved significantly with current controllers if calibrated and compensated for with look up tables or polynomial error correction. Incremental linear encoders are still prevalent, because of their interfacing simplicity and higher possible resolution down to the picometer range if used with electronic interpolators, but absolute position encoders are indeed catching up with nanometer resolution models becoming a lot more affordable.
LIP481U linear encoder. (Image: Heidenhain)
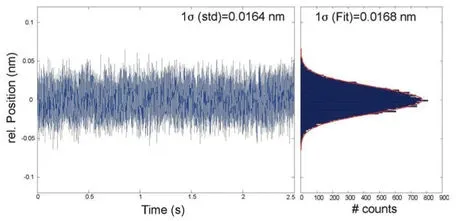
Noise measurement of a positioning system with a PIOne linear encoder (400 kHz bandwidth, 18-bit resolution): 16 picometer RMS and 100 picometer peak-to-peak. (Image: PI)
Rotation stages comprise of a platform that rotates relative to a base. The base and platform are joined by some form of bearing which restricts motion of the platform to rotation about a single axis.
A wide range of motors and drive principles can be used, from direct-drive closed loop torque motors to stepper-motor driven worm gear designs. Self-locking capabilities with zero jitter and drift are provided by low profile piezo motor stages, requiring no holding current at rest.
Precision motorized rotation stages are employed in applications such as semiconductor inspection, fiber-optical alignment, X-ray crystallography and bio-medical applications.
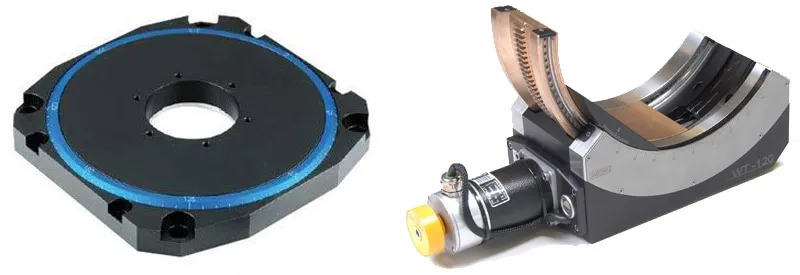
(left) U-651 low profile rotation stage based on ceramic direct-drive motors. (Image: PI)
(right) High precision motorized goniometer cradle. (Image: PI miCos)
Air bearings use a thin film of pressurized air to provide an exceedingly low friction load-bearing interface between surfaces. The two surfaces do not touch. Since they are contact-free, air bearings prevent the traditional bearing-related problems of friction, particulates, wear and lubricant handling, and offer distinct advantages in high-speed and precision positioning applications, where the elimination of static friction and backlash are critical.
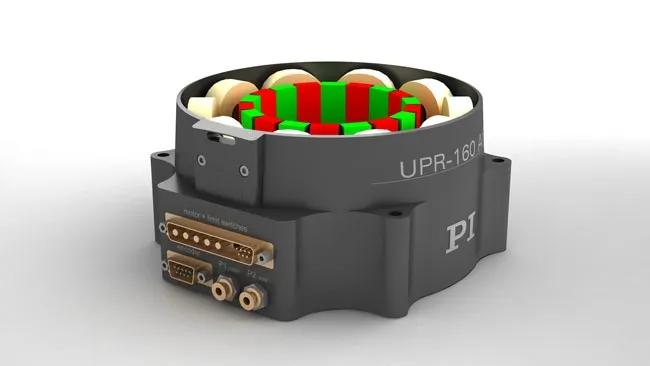
Video - Look inside torque-motor driven rotary stage. (Image: PI)
Rotary air bearings stages provide extremely good guiding precision. The graph above shows radial runout error motion of a PI RT300L stage. Red line: perfect circle with no error. Blue line: actual error (in microns). Dashed lines: max/min error bands around the perfect circle. (±25 nanometers) (Image: PI)
Air-bearing rotation stages, generally used for the highest precision and smoothness of motion/velocity, deliver ultra-low runout and wobble, as well as very high resolution and repeatability. Pitch, yaw, roll on the order of one arc second is feasible. The absence of friction prevents backlash and provides the air bearing stage ultra-high repeatability. If calculated, designed and operated correctly, the durability of air bearings is unlimited.
A goniometer is an instrument that either allows an object to be rotated to a precise angular position or measures an angle. A goniometric stage or positioning goniometer is a device used to rotate an object precisely about a fixed axis in space. It is similar to a linear stage, but instead of moving linearly with respect to its base, the stage platform rotates partially about a fixed axis above the mounting surface of the platform. A worm drive with a partial worm wheel attached to the underside of the stage platform meshing with a worm in the base is typically used by positioning goniometers. A motor rotates the worm.
Goniometers are frequently used in X-ray diffraction and in crystallography to rotate the samples. They are also employed in (fiber) optic alignment applications.