Direct current motors commonly named DC motors
The motor rotates discontinuously. To improve the resolution, the number of steps can be increased electronically (micro-stepping). This solution is described in greater detail in the section on electronic speed control.
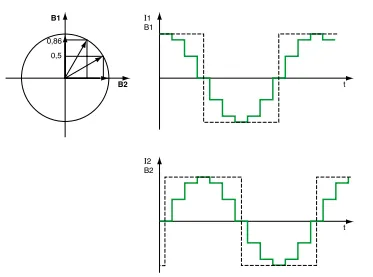
Varying the current in the coils by graduation results in a field which slides from one step to the next and effectively shortens the step.
Some circuits for micro-steps multiply by 500 the number of steps in a motor, changing, e.g. from 200 to 100,000 steps.
Electronics can be used to control the chronology of the pulses and count them. Stepper motors and their control circuits regulate the speed and amplitude of axis rotation with great precision.
Current steps in motor coils to shorten its step
They thus behave in a similar way to a synchronous motor when the shaft is in constant rotation, i.e. specific limits of frequency, torque and inertia in the driven load.
When these limits are exceeded, the motor stalls and comes to a standstill.
Precise angular positioning is possible without a measuring loop. These motors, usually rated less than a kW, are for small low-voltage equipment. In industry, they are used for positioning purposes such as stop setting for cutting to length, valve control, optical or measuring devices, press or machine tool loading/unloading, etc.
The simplicity of this solution makes it particularly cost-effective (no feedback loop). Magnetic stepper motors also have the advantage of a standstill torque when there is no power. However, the initial position of the mobile part must be known and integrated by the electronics to ensure efficient control.
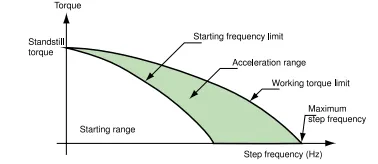
Maximum torque depending on step frequency
Separate excitation, DC motors are still used for variable speed drive, though they are seriously rivalled by asynchronous motors fitted with frequency converters.
Very easy to miniaturise, they are ideal for low-power and low-voltage machines. They also lend themselves very well to speed control up to several megawatts with inexpensive and simple high-performance electronic technologies (variation range commonly of 1 to 100).
They also have features for precise torque adjustment in motor or generator application. Their rated rotation speed, independent of the mains frequency, is easy to adapt for all uses at the manufacturing stage.
On the other hand, they are not as rugged as asynchronous motors and their parts and upkeep are much more expensive as they require regular maintenance of the collectors and brushes.

DC motor
Structure
A DC motor consists of the following components:
Inductor or stator
This is a part of the immobile magnetic circuit with a coil wound on it to produce a magnetic field, this winding can be replaced by permanent magnets specially in the low power range. The resulting electromagnet has a cylindrical cavity between its poles.
Armature or rotor
This is a cylinder of magnetic plates insulated from each other and perpendicular to the cylinder axis. The armature is mobile, rotates on its axis and is separated from the inductor by an air gap. The conductors are distributed regularly around it.
Collector and brushes
The collector is built into the armature. The brushes are immobile and rub against the collector to power the armature conductors.
Operating principle
When the inductor is powered, it creates a magnetic field (excitation flux) in the air gap, directed by the radii of the armature. The magnetic field “enters” the armature on the north pole side of the inductor and “leaves” it on the south pole side.
When the armature is powered, its conductors located below one inductor pole (on the same side as the brushes) are crossed by currents in the same direction and so are subjected to a Lorentz law force. The conductors below the other pole are subjected to a force of the same strength and in the opposite direction. Both forces create a torque which rotates the motor armature.
When the motor armature is powered by a direct or rectified voltage U and the rotor is rotating, a counter-electromotive force E is produced. Its value is E = U – RI.
RI represents the drop-in ohm voltage in the armature. The counterelectromotive force E is related to the speed and excitation by E = k w f
where:
- k is a constant of the motor itself,
- w is the angular speed,
- f, is the flux.
This relationship shows that, at constant excitation, the counterelectromotive force E, proportional to w, is an image of the speed. The torque is related to the inductor flux and the current in the armature by:

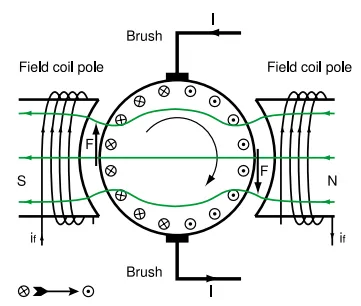
Production of torque in a DC motor
When the flux is reduced, the torque decreases.
There are two ways to increase the speed:
- increasing the counter-electromotive force E and thus the supply voltage: this is called “constant torque” operation,
- decreasing the excitation flux and hence the excitation current and maintain a constant supply voltage: this is called “reduced flux” or constant power operation. This operation requires the torque to decrease as the speed increases.
Furthermore, for high constant power ratios, this operation requires motors to be specially adapted (mechanically and electrically) to overcome switching problems. Operation of such devices (direct current motors) is reversible: - if the load counters the rotation movement (resistant load), the device produces a torque and operates as a motor, - if the load makes the device run (driving load) or counters slowdown (standstill phase of a load with a certain inertia), the device produces electrical power and works as a generator.
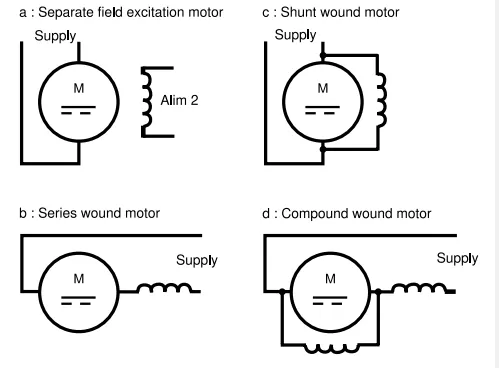
Diagrams of direct current motor types
Operating asynchronous motors
• series parallel motor (compound) This technology combines the benefits of the series and parallel excitation motors. It has two windings. One is parallel to the armature (shunt winding) or is a separate excitation winding. It is crossed by a current that is weak compared to the working current. The other is in series. The motor has an added flux under the combined effect of the ampere-turns of both windings. Otherwise, it has a subtracted flux, but this system is rarely used because it causes operating instability at high loads.
Squirrel cage motors
Consequences of variation in voltage
• Effects on the current
Voltage increase has two effects. During the starting phase the inrush current will be higher than nominal and when the machine will be running, the absorbed current increases steeply and the machine is likely to overheat, even when operating at low load. This increase is due to the saturation of the machine.
• Effect on speed
When the voltage varies, the synchronous speed is not altered but, when a motor is loaded, an increase in voltage causes the slip to decrease slightly. In practical terms, this property cannot be used due to the saturation of the motor, the current increases steeply and the machine is likely to overheat. Likewise, if the supply voltage decreases, the slip increases and the absorbed current increases to provide the torque, which may also cause overheating.
Furthermore, as the maximum torque decreases with the square of the voltage, there is a likelihood of stalling if the voltage drops steeply.
Consequences of a variation in frequency
• Effect on the torque
As in any electrical machine, the torque of an asynchronous motor is of the type:

(K = constant factor dependent on the machine).
In the equivalent diagram as shown, the coil L produces the flux and Io is the magnetising current. Note that the equivalent schema of an asynchronous motor is the same as that of a transformer and both devices are characterised by the same equation.
In an initial approximation, forgetting the resistance and considering the magnetising inductance only (i.e. for frequencies of a few Hertz) the Io current is expressed as: Io = U / 2p L f and the flux expressed as:

The machine torque is therefore expressed as:
T = K k Io I. Io and I are the rated currents the motor is sized for.
To keep within the limits, Io must be maintained at its rated value, which can only be the case if the U/f ratio remains constant.
Consequently, the torque and rated currents can be obtained as long as the supply voltage U can be adjusted to the frequency.
When this is not possible, the frequency can still be increased, but the Io current decreases and so does the working torque since it is not possible to exceed the machine’s rated current continuously without running the risk of overheating it.
To operate with a constant torque at any speed the U/F ratio must be kept constant. This is what a frequency converter does.
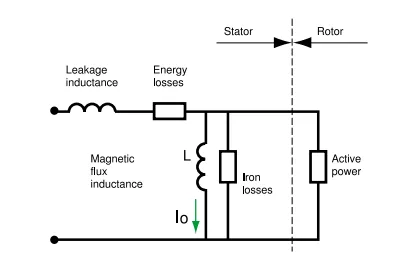
Equivalent diagram of an asynchronous motor
• Effect on speed
The rotation speed of an asynchronous motor is proportional to the frequency of the supply voltage. This property is often used to operate specially designed machines at high speed, e.g. with a power supply at 400Hz (grinders, laboratory or surgical devices, etc.). Speed can also be varied by adjusting the frequency, for example from 6 to 50Hz (conveyor rollers, hoisting equipment’s, etc.).
Speed control in 3-phase asynchronous motors
For a long time, there were not many ways of controlling the speed of asynchronous motors. Squirrel cage motors mostly had to be used at their rated RPM.
Set speeds could practically only be obtained by motors with pole changing or separate stator windings, which are still widely in use.
With frequency converters i.e. AC drives, squirrel cage motors are now often speed-controlled, so can be used for purposes hitherto confined to direct current motors.
Pole-changing motors
As we have already seen, the speed of a squirrel cage motor depends on the mains supply frequency and the number of pairs of poles. So, a motor with two or more speeds can be made by combining windings in the stator to correspond to different numbers of poles.
This type of motor can only have1/2 speed ratios (4 and 8 poles, 6 and 12 poles, etc.). It has six terminals.
For one of these speeds, the mains supply is connected to the three corresponding terminals. For the other, these terminals are connected to each other and the mains is connected to the remaining three.
Mostly, for both high and low speed, the motor is started direct on line involving no special device (direct starting).
In some cases, if the operating conditions require it and the motor allows it, the starting device automatically moves into low speed before changing to high speed or before stopping.
Depending on the currents absorbed by the Low Speed (LS) or High Speed (HS) changes, both speeds can be protected by a single thermal relay or by two relays (one for each speed).
Such motors usually have low efficiency and a fairly low power factor
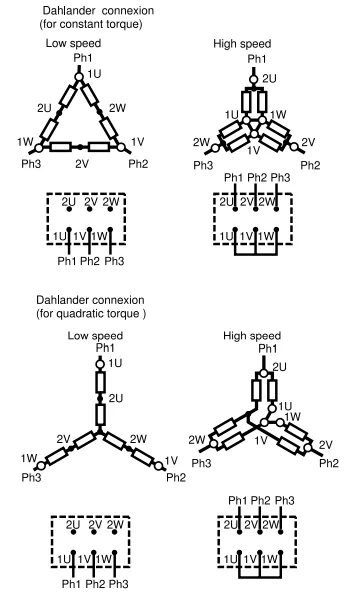
Types of Dahlander connections
Separate stator winding motors
These motors, with two electrically separate stator windings, can produce two speeds in any ratio. However, their electrical characteristics are often affected by the fact that the low speed windings have to support the mechanical and electrical stress of high speed operation. So motors in low speed mode sometimes absorb more current than they do in high speed mode.
Three or four speed motors can be made by changing the poles on one or both of the stator windings. This solution requires additional connectors on the coils.
Slip-ring motors
Rotor resistance
The resistor externally inserted into the rotor circuit in this kind of motor defines:
- its starting torque,
- its speed.
A resistor permanently connected to the terminals of a slip-ring motor lowers its speed and the higher its value, the more the speed drops. This is a simple solution for speed variation.
Slip-ring speed control
Slip-ring rotor resistors can be short-circuited in several steps to adjust speed discontinuously or accelerate gradually and fully start the motor. They have to support the entire duration of operation, especially when they are intended for speed control. This implies they can be bulky and costly.
This very simple process is used less and less because it has two major drawbacks:
- at low speed, a great deal of power from the mains supply is dissipated and lost in the resistors,
- the speed obtained is not independent of the load but varies with the load torque the machine exerts on the motor shaft.
For any one resistor, the slip is proportional to the torque. For instance, the drop-in speed caused by a resistor can be 50% at full load and only 25% at half load, whereas at no load, the speed hardly changes and is closed to the synchronous speed minus the slip.
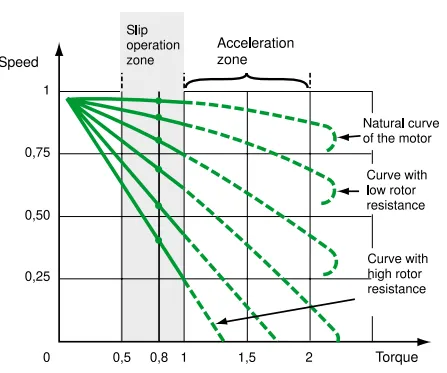
Torque speed characteristics of a slip ring motor
If the machine is constantly monitored by an operator, this one can change the resistor value as required to set the speed in a certain area for fairly high loas, but adjustment is practically impossible at no load condition. To reach a point of “low speed at low torque”, it inserts a very high resistance and then the slightest variation in the load torque changes the speed from zero to nearly 100%. This is too unstable.
Adjustment can also be impossible for machines with specific variation of the load torque relevant to the speed.
Example of slip ring operation. For a variable load exerting a load torque of 0.8 Cn, different speeds can be obtained as represented by the sign * in the diagram.
For the same torque, the speed decreases as the rotor resistance increases