Principles of Operation of Induction Motors
The motor of Figure 3.3 is not a practical motor, but it illustrates the principles of operation of induction motors. A squirrel-cage rotor similar to the one in Figure 3.1 is surrounded by a permanent magnet with two poles (one a north pole and the other a south pole). The rotor in this case is made from aluminium, a material that conducts electrical current but is not attracted to magnets. Imagine that the rotor is initially stationary, but the permanent magnet is made to rotate clockwise, as indicated by the arrows. The rotor is thus positioned in a rotating magnetic field. Due to the relative motion between the rotor and rotating field, the aluminium bars in the rotor cut across the magnetic lines of force flowing from the north pole to the south pole and electrical currents are induced in the bars. The currents flow toward the reader in the conductors nearest the north pole (as indicated by the dots) and away from the reader in the conductors nearest the south pole (as indicated by the plus signs). These induced currents in turn generate magnetic fields around each conductor; these circular fields are counterclockwise about the conductors nearest the north pole. The counterclockwise fields add to the rotating flux field on the left side of each conductor and subtract on the right side. Consequently, the bars tend to move to the right into the weaker flux field. Near the south pole, similar logic shows that the bars tend to move to the left into a weaker flux field. The net result is that the rotor rotates clockwise, that is, in the same direction that the magnetic flux field is rotating. However, the rotor cannot attain the same rotational speed as the rotating magnetic field or there would be no relative motion to induce currents in the bars of the squirrel cage.
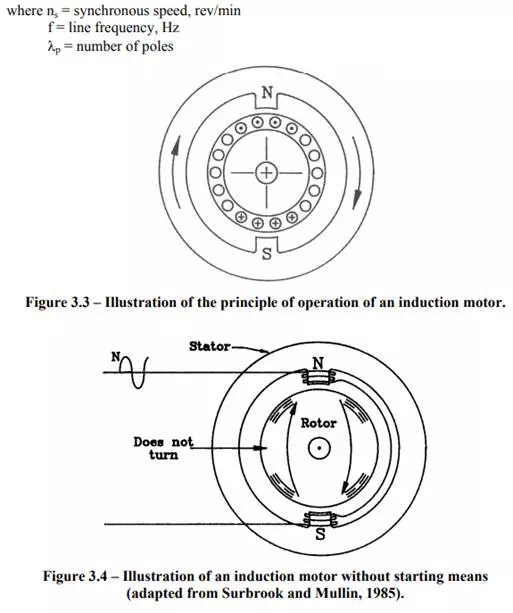
The motor in Figure 3.4 is similar to the one in Figure 3.2, except that the outer frame is now held stationary (it becomes a stator) and the permanent magnets are replaced with electromagnets wired in series. The electromagnets are connected to a source of alternating current. Thus, as the AC current goes through a full sine wave, the top electromagnet starts at zero magnetism, builds to a strong north pole, diminishes to zero, builds to a strong south pole, diminishes to zero again, and the cycle repeats. Because of the arrangement of the windings, the bottom magnet is going through a similar pattern, except that its magnetic polarity is opposite that of the top magnet. Note that, along a vertical line through the center of the squirrel-cage rotor, the variation of the magnetic field is the same as if the permanent magnet of Figure 3.3 was rotating, that is, the magnetic flux builds to a maximum in the downward direction, diminishes to zero, builds to a maximum in the upward direction, diminishes to zero, etc. Thus, the motor of Figure 3.4 can be viewed as having a rotating field. The synchronous speed, that is, the speed at which the field appears to rotate, can be calculated by using the following equation:

In the United States, the standard line frequency is 60 Hz. Then, for the motor of Figure 3.3 with two poles, the synchronous speed would be 3600 rev/min. The rotor cannot turn as fast as the synchronous speed in an induction motor, that is, there is some slip, defined as:

where s = slip,
decimal nr = rotor speed (and shaft speed), rev/min
Combining Equations 3.1 and 3.2 gives the following equation for rotor speed:

The slip s = 1.0 at startup and declines to some small value when the motor reaches full speed. For example, if the two-pole motor of Figure 3.4 was driven with 60 Hz AC current and the slip was 4.17%, the rotor speed would be 3450 rev/min. Note that, if the bottom pole in Figure 3.4 was positioned 90° from the top pole instead of 180°, the magnetic field would rotate only half a revolution in each voltage cycle. Another set of poles could be added to allow the magnetic field to complete the full revolution in two voltage cycles. Doubling the number of stator poles to four would reduce the synchronous speed to 1800 rev/min and, if the slip was 4.17%, the rotor speed would be 1725 rev/min.
The motor of Figure 3.4 has no provision for starting the rotor into motion. Once started, the rotor would continue to run in the initial direction because of the alternating magnetic field. As explained in the next section, there are various types of singlephase induction motors, each differing in the means used to start the rotor into motion.