Loads Acting on Aircraft
The flight envelope of an aeroplane can be divided into two regimes. The
first is rectilinear flight in a straight line, i.e. the aircraft does not
accelerate normal to the direction of flight. The second is curvilinear flight,
which, as the name suggests, involves flight in a curved path with acceleration
normal to tangential flight path. Curvilinear flight is often known as
manoeuvring and is of greater importance for structural design since the
aerodynamic and inertial loads are much higher than in rectilinear flight.
As the aircraft moves relative to the surrounding fluid a pressure field
is set up over the entire aircraft, and not only over the wings, that acts to
keep the aircraft afloat. This aerodynamic pressure always acts normal to the
outer contour of the skin but the resultant force can be resolved into two
forces acting tangential and normal to the direction of flight. The sum of the
forces normal to the direction of flight give rise to the lift force L, which
offsets the weight of the aircraft i.e. offsets the weight of the aircraft W.
The tangential components give the resultant drag force D, which in powered
flight must be overcome by the propulsive force F. The resultant force F
includes the thrust generated by the engines, the induced drag of the
propulsive system and the inclination of the line of thrust to the direction of
flight. In basic mechanics the aircraft is simplified into a point coincident
with the centre of gravity (CG) of the aircraft with all forces assumed to act
through the centre of gravity. If the net resultant of a force is offset from
the CG then a resultant moment will also act on the aircraft. For example, the
lift generated by the wings is generally offset from the centre of gravity of
the aircraft and may thus produce a net pitching moment that has to be offset
by the control surfaces. Figure 1 below shows as a simplified free body diagram
of an aircraft in level flight, climb and descent.

Fig. 1. Free body diagram of aircraft in flight (1)
Note that the lift is only equal and opposite to the
weight in steady and level flight, thus:
![]() and
and ![]()
In steady descent and steady climb the lift component is less than the
weight, since only a component of the weight acts normal to the direction of
flight and because by definition lift is always normal to both drag and thrust.
Also in climbing the thrust must be greater than the drag to overcome the
component of weight acting against the direction of flight and vice versa in
descent. Thus in a climb:
![]() and
and ![]()
and in descent
![]() ,
, ![]()
This situation is schematically represented in Figure 1 by the relative
sizes of the different arrows. In general we can imagine the weight being
balanced by the lift force L and the difference between the thrust F and the
drag D. A bit of manipulation of the two equations for climb or
descent above gives the same expression,
![]()
such that,
![]()
The latter expression is clearly obtained if Pythagoras’ rule is applied
to the vector triangles that include (F-D) and L in Figure 1.
Figure 1 also shows velocity diagrams depicting the relationship between
true air speed V, tangential to the direction of flight, and the rates of climb
and descent ![]() and
and ![]() respectively. We can combine these
velocity triangles with the forces triangles to obtain simple equations for the
rates of climb and descent,
respectively. We can combine these
velocity triangles with the forces triangles to obtain simple equations for the
rates of climb and descent,
![]() and
and ![]()
such that ![]() or
or ![]() .
.
This expression can also be used to gain some insight into the driving
factors behind gliding flight. In this case the net propulsive force F is zero
such that the expression becomes,
![]() which may be approximated to
which may be approximated to ![]() since
the angle of descent in gliding is typically very shallow. Therefore the
gliding efficiency of a sailplane depends on maximising the lift to drag ratio
L/D. If the ascending thermals are equal to or greater than this rate of
descent than the glider can continuously maintain or even gain in altitude.
since
the angle of descent in gliding is typically very shallow. Therefore the
gliding efficiency of a sailplane depends on maximising the lift to drag ratio
L/D. If the ascending thermals are equal to or greater than this rate of
descent than the glider can continuously maintain or even gain in altitude.
An aircraft may of course increase its speed along the direction of
rectilinear flight in which case the thrust force F must be greater than the
vector sum of the drag and the component of the weight. A more interesting
scenario are accelerated flight where the acceleration occurs as a result in
change in direction rather than a change in speed. By definition, in vector
mechanics a change in direction is a change in velocity and therefore defined
as acceleration, even if the magnitude of the speed does not change. A change
in the flight path is achieved by changing the magnitude of the overall lift
component or by differences in lift between the two wings, away from the
equilibrium condition depicted in Figure 1. This change can either be obtained
by a change in true airspeed or by changing the angle of attack of the wings
relative to the airflow. Consider the simple banked turn in Figure 2 below.
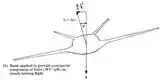
Fig. 2. Free Body Diagram of an aircraft in a banked turn
(1)
As the aircraft banks the lift force normal to the wings is turned
through an angle ![]() from
the vertical weight vector. Since the centripetal acceleration acts
horizontally and the weight acts vertically we can use simple trigonometric
relations to find the radius of turn:
from
the vertical weight vector. Since the centripetal acceleration acts
horizontally and the weight acts vertically we can use simple trigonometric
relations to find the radius of turn:
![]() such that
such that ![]() . It is
also obvious that the more steeply banked the turn the more lift will be
required from the wings since,
. It is
also obvious that the more steeply banked the turn the more lift will be
required from the wings since,
![]()
such that increase in engine power is
needed to maintain constant speed under this flight condition. This is one of
the reasons why fighter jets that require manoeuvres with very tight radii have
such short and stubby wings. Small radii if turn R and thus high banking
angles ![]() require
increases in lift and therefore increase the bending moments acting on the
wings.
require
increases in lift and therefore increase the bending moments acting on the
wings.
In reality the airplane is subjected to a large variety of different
combinations of accelerations (rolls, pull-ups, push-overs, spinning, stalling , gusts etc.) at different velocities and
altitudes. In classical mechanics free fall is expressed as having an
acceleration 0f -1g and level flight is denoted as 0g. The aeronautical
engineer differs from this convention in order to make the comparison between
lift and weight simpler. This means that free fall is denoted by 0g and level
flight by 1g. The ratio between lift and aircraft weight is called the load
factor n, where ![]() , i.e.
n = 0 for free fall, n = 1 for level flight, n > 1 to pull out of a dive and
n < 1 to pull out of a climb. The overall load spectrum of an aircraft is
captured graphically by so called velocity – load factor (V-n) curves. The
outline of these diagrams are given by the possible combinations of load factor
and velocity than an aircraft will be expected to cope with. For example Figure
3a shows the basic V-n diagram for symmetric flight (asymmetric envelopes exist
for rolls etc. but are not covered here).
, i.e.
n = 0 for free fall, n = 1 for level flight, n > 1 to pull out of a dive and
n < 1 to pull out of a climb. The overall load spectrum of an aircraft is
captured graphically by so called velocity – load factor (V-n) curves. The
outline of these diagrams are given by the possible combinations of load factor
and velocity than an aircraft will be expected to cope with. For example Figure
3a shows the basic V-n diagram for symmetric flight (asymmetric envelopes exist
for rolls etc. but are not covered here).

Fig. 2 The a) basic manoeuvre and b) gust flight envelopes
(1)
The envelope is constructed from the positive and negative stall lines
which indicate, respectively, the maximum and minimum load that can be achieved
because of the inability of the aircraft to produce any more lift. Thus,
![]()
where ![]() is the density of the
surrounding air and
is the density of the
surrounding air and ![]() is
the wing surface area. The limiting factor
is
the wing surface area. The limiting factor ![]() also known as the maximum
expected service load is defined by
also known as the maximum
expected service load is defined by
![]() or 2.5, whichever is greater, with W the max take-off
weight.
or 2.5, whichever is greater, with W the max take-off
weight.
![]() ,
, ![]() and
and ![]() are defined as the
maximum manoeuvre speed ( the speed above
which it is unwise to make full application of any single flight control), the
design cruise speed and the maximum dive speed, respectively. The intersection
between the horizontal line
are defined as the
maximum manoeuvre speed ( the speed above
which it is unwise to make full application of any single flight control), the
design cruise speed and the maximum dive speed, respectively. The intersection
between the horizontal line ![]() and
the left curve of the envelope is also of special significance since it
represents the stall speed at level flight. In general the limit load factor
must be tolerable without detrimental permanent deformation. The aircraft must
also support an ultimate load (=limit load x safety factor) for at least 3
seconds. The safety factor is generally taken to be 1.5.
and
the left curve of the envelope is also of special significance since it
represents the stall speed at level flight. In general the limit load factor
must be tolerable without detrimental permanent deformation. The aircraft must
also support an ultimate load (=limit load x safety factor) for at least 3
seconds. The safety factor is generally taken to be 1.5.
Finally, Figure 3b shows a typical gust envelope. A gust alters the
angle of attack of the lifting surfaces by an amount equal to ![]() where
w is the vertical gust velocity. Since the lift scales with the angle of attack
up to the point of aerodynamic stall, the inertia forces applied to structure
are altered by the gust winds. The gust
envelope is constructed with the same stall lines as the basic manoeuvre
envelope and different gust lines are drawn radiating from n = 1 at V = 0. Note
that the design gust intensities reduce as the velocity increases, with the
intention that the aircraft is flown accordingly. In the gust envelope
where
w is the vertical gust velocity. Since the lift scales with the angle of attack
up to the point of aerodynamic stall, the inertia forces applied to structure
are altered by the gust winds. The gust
envelope is constructed with the same stall lines as the basic manoeuvre
envelope and different gust lines are drawn radiating from n = 1 at V = 0. Note
that the design gust intensities reduce as the velocity increases, with the
intention that the aircraft is flown accordingly. In the gust envelope ![]() is replaced with
is replaced with ![]() ,
representing the design speed at maximum gust intensity.
,
representing the design speed at maximum gust intensity.