State Space Model
The state space model of Linear Time-Invariant (LTI) system can be represented as,
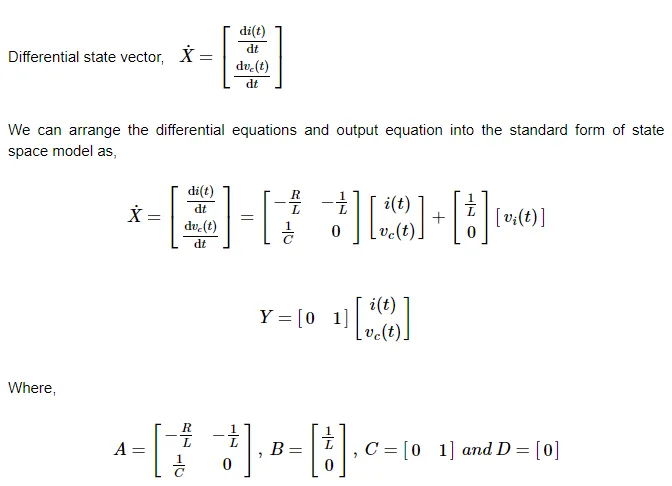
˙X=AX+BU
Y=CX+DU
The first and the second equations are known as state equation and output equation respectively.
Where,
· X and ˙X are the state vector and the differential state vector respectively.
· U and Y are input vector and output vector respectively.
· A is the system matrix.
· B and C are the input and the output matrices.
· D is the feed-forward matrix.
The following basic terminology involved in this chapter.
It is a group of variables, which summarizes the history of the system in order to predict the future values (outputs).
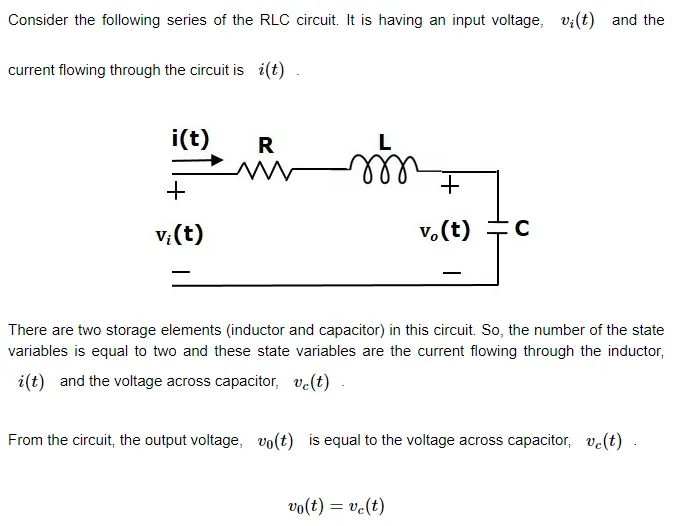
The number of the state variables required is equal to the number of the storage elements present in the system.
Examples − current flowing through inductor, voltage across capacitor
It is a vector, which contains the state variables as elements.
In the earlier chapters, we have discussed two mathematical models of the control systems. Those are the differential equation model and the transfer function model. The state space model can be obtained from any one of these two mathematical models. Let us now discuss these two methods one by one.
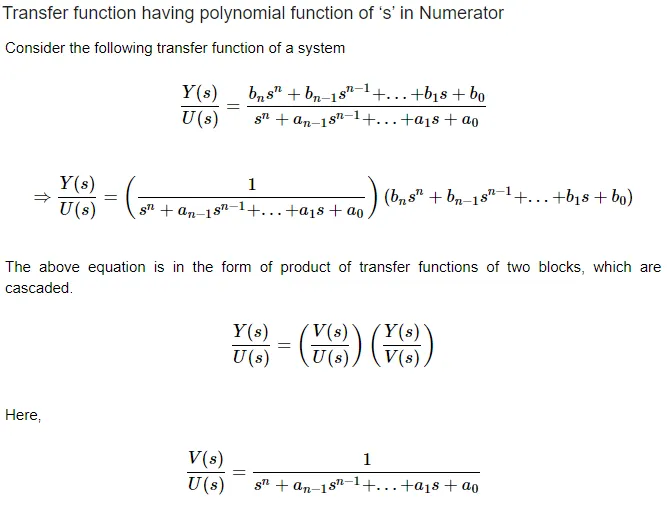
Consider the two types of transfer functions based on the type of terms present in the numerator.
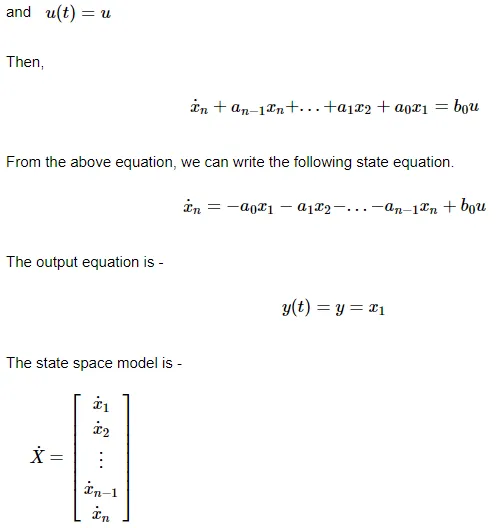
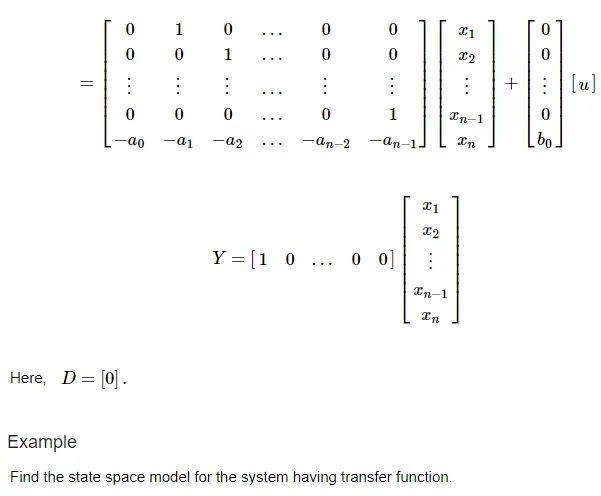
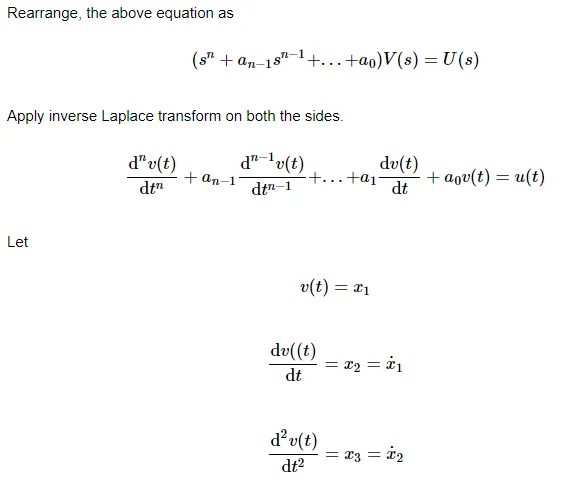
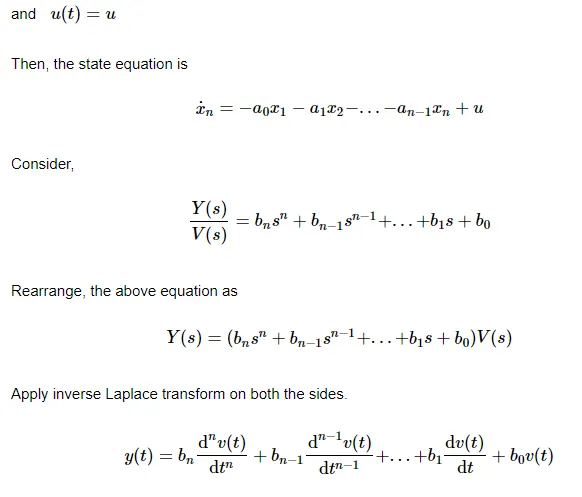
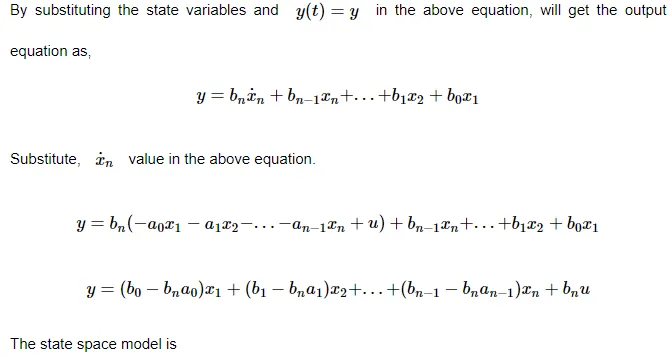
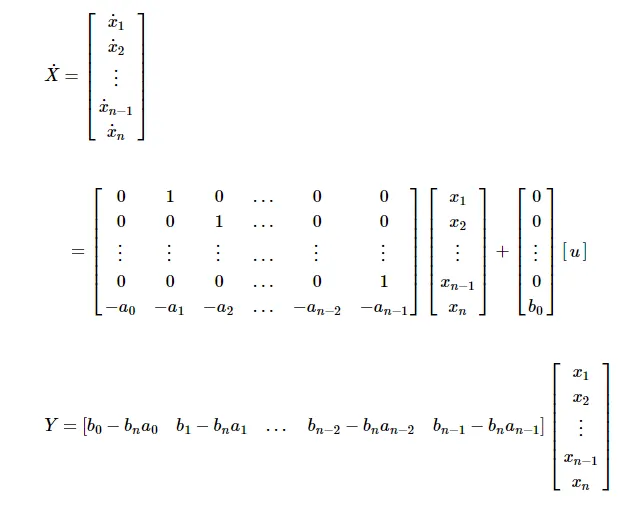
Consider the following transfer function of a system